کاربرد های پردازش تصویر در دنیای امروز
علم پردازش تصویر در چند دهه اخیر از هر دو جنبه نظری و عملی پیشرفت های چشمگیری داشته است. سرعت این پیشرفت به اندازه ای بوده است که هم اکنون، به راحتی می توان رد پای پردازش تصویر را در بسیاری از علوم و صنایع مشاهده نمود. بعضی از این کاربردها آنچنان به پردازش تصویر وابسته هستند که بدون آن،اساساً قابل استفاده نمی باشند. اگر چه ذکر تمام جزئیات کاربردهای پردازش تصویر در یک مقاله امکان پذیر نمی باشد ولی سعی شده است که به طور کلی اکثر زمینه های کاربرد آن بیان شود. در این مقاله چهارده زمینه ی مختلف کاربرد پردازش تصویر بیان شده است که عبارتند از: صنعت، پزشکی، علوم نظامی و امنیتی، زمین شناسی، فضانوردی و نجوم، شهرسازی، هنر و سینما، فناوری های علمی، سیاست و روانشناسی، کشاورزی، هواشناسی، باستان شناسی، اقتصاد و تبلیغات می باشد.
كليد واژه- پردازش تصویر(Image processing)، بینایی ماشین(Machine vision)، کاربرد
1- مقدمه
امروزه با گسترش روز افزون روش های مختلف اخذ اطلاعات گسسته مانند پویشگرها و دوربین های دیجیتالی، پردازش تصویر کاربرد فراوانی یافته است. تصاویر حاصله از این اطلاعات همواره کم و بیش همراه مقداری نویز بوده و در مواردی نیز دارای مشکل محوشدگی مرزهای نمونه های داخل تصویر می باشند که موجب کاهش وضوح تصویر دریافتی می گردند. مجموعه عملیات و روش هایی که به منظور کاهش عیوب و افزایش کیفیت ظاهری تصویر مورد استفاده قرار میگیرد، پردازش تصویر نامیده می شود. اگرچه حوزه های کار با تصویر بسیار وسیع است ولی عموماً محدوده مورد توجه در چهار زمینه ی بهبود کیفیت ظاهری(Enhancement)، بازسازی تصاویر مختل شده(Restoration)، فشرده گی و رمزگذاری تصویر (Compression and Coding) و درک تصویر توسط ماشین (Understanding) متمرکز می گردد.
بهبود تصاویر شامل روش هایی مثل استفاده از فــ….یـــ……لـــ……تـــ…. …ر محو کننده و افزایش تضاد برای بهتر کردن کیفیت دیداری تصاویر و اطمینان از نمایش درست آن ها در محیط مقصد است. بینایی ماشین به روش هایی می پردازد که به کمک آن ها می توان معنی و محتوای تصاویر را درک کرد تا از آن ها در کارهایی چون رباتیک و محور تصاویر استفاده شود. پردازش تصویر از هر دو جنبه نظری و عملی پیشرفت های چشمگیری داشته است و بسیاری از علوم به آن وابسته اند.
2- کاربردهای پردازش تصویر
زمینه های مختلف کاربرد پردازش تصویر عبارتند از صنعت، هواشناسی، شهرسازی، کشاورزی، علوم نظامی و امنیتی، نجوم و فضا نوردی، پزشکی، فناوری های علمی، باستان شناسی، تبلیغات، سینما، اقتصاد، روانشناسی و زمین شناسی که در ادامه درباره هر کدام مختصراً بحث شده است.
2-1-صنعت
امروزه کمتر کارخانه پیشرفته ای وجود دارد که بخشی از خط تولید آن توسط برنامه های هوشمند بینایی ماشین کنترل نشود. خطای بسیار کم، سرعت زیاد، هزینه نگهداری بسیار پایین، عدم نیاز به حضور اپراتور 24 ساعته و خیلی مزایای دیگر باعث شده که صنایع و کارخانه ها به سرعت به سمت پردازش تصویر و بینایی ماشین روی بیاورند. دستگاهی ساخته شده که قادر است کیک های پخته را از کیک هایی که نیاز به پخت مجدد دارند، تشخیص دهد و آنها را به صورت اتوماتیک به بسته بندی بفرستد و کیک هایی که نیاز به پخت دارند را دوباره برای پختن ارسال کند.
یکی دیگر از دلایل استفاده از بینایی ماشین قابلیت دیدن و اندازه گیری محصولاتی است که دیدن یا اندازه گیری آنها با چشم غیر مسلح غیر ممکن است. عناصر تشکیل دهنده یک سیستم بینایی ماشین نرم افزار هوشمند بینایی است که ورودی خود را از دوربین های نصب شده در بخش های مختلف خط تولید می گیرد و بر اساس تصاویر دریافتی دستورات لازم برای کنترل ماشین های صنعتی را صادر می کند. پردازش تصویر در تشخیص دمای کوره هایی که هیچ وسیله ی مکانیکی و الکترونیکی تحمل دمای آنها را ندارد، کاربرد دارد. دوربین های حرارتی می توانند مشکل بخشی از سازه ی مورد نظر را تشخیص دهند.
2-2- هواشناسی
از آنجایی که در علم هواشناسی تشخیص و پیش بینی آب و هوا اکثراً از طریق تصاویر هوایی و ماهواره ای انجام می گیرد، پردازش تصویر در این علم کاربرد زیادی دارد و دقت و سرعت پیش بینی آب و هوا و طوفان ها را بسیار بالا می برد. جبهه های پرفشار، کم فشار، گردبادها و گرداب های بوجود آمده در سطح کره زمین را می توان مشاهده کرد.
2-3-شهرسازی
با مقایسه عکس های مختلف از سال های مختلف یک شهر می توان میزان گسترش و پیشرفت آن را مشاهده کرد.
کاربرد دیگر پردازش تصویر می تواند در کنترل ترافیک باشد. با گرفتن عکس های هوایی از زمین ترافیک هر قسمت از شهر مشخص می شود.
قبل از ساختن یک شهر می توان آن را توسط کامپیوتر شبیه سازی کرد که به صورت دو بعدی از بالا و حتی به صورت سه بعدی از دید های مختلف، یک شهرک چطور ممکن است به نظر برسد. تصاویر ماهواره ای که از شهرها گرفته می شود، می تواند توسط فــ….یـــ……لـــ……تـــ…. …رهای مختلف پردازش تصویر فــ….یـــ……لـــ……تـــ…. …ر شود و اطلاعات مختلفی از آن استخراج شود. به طور مثال این که شهر در چه قسمت هایی دارای ساختمان ها، آب ها یا راه های بیشتری است و همین طور می توان جاده هایی که داخل یا خارج از شهر کشیده شده اند را تحلیل کرد.
2-4- کشاورزی
این علم در بخش کشاورزی معمولاً در دو حالت کاربرد دارد. یکی در پردازش تصاویر گرفته شده از ارتفاعات بالا مثلاً از هواپیما و دیگری در پردازش تصاویر نزدیک به زمین.
در تصاویر دور به عنوان مثال می توان تقسیم بندی اراضی را تحلیل کرد. همچنین می توان با مقایسه تصاویر دریافتی در زمان های متفاوت میزان صدمات احتمالی وارد به محیط زیست را دید. به عنوان مثال می توان برنامه ای نوشت که با توجه به محل رودخانه ها و نوع خاک مناطق مختلف، به صورت اتوماتیک بهترین نقاط برای کشت محصولات مختلف را تعیین می کند.
تصاویر نزدیک هم در ساخت ماشین های هرز چین اتوماتیک کاربرد دارد. امروزه ماشین های بسیار گران قیمت کشاورزی وجود دارند که می توانند علف های هرز را از گیاهان تشخیص بدهند و به صورت خودکار آنها را نابود کنند.
برای مثال یکی از پروژه های جالب در بخش کشاورزی، تشخیص خودکار گل زعفران برای جداسازی پرچم قرمز رنگ آن بوده است. این پردازش که توسط نرم افزار Stigma detection®انجام گرفته است.
2-5-علوم نظامی و امنیتی
پردازش تصویر بخصوص بینایی هوشمند، کاربردهای بسیاری را در علوم نظامی و امنیتی دارند و این کاربرد برای دولت اکثر کشورها بسیار مهم است. به عنوان مثال موشک هدایت شونده خودکاری وجود دارد که می تواند روی در یک ساختمان قفل کند و حتی می تواند به درز بین در و دیوار آن ساختمان که حساس ترین جای ساختمان است به راحتی نفوذ کند. این موشک به صورت اتوماتیک این قسمت را شناسایی کرده و به سمت آن حمله می کند.
در مسائل امنیتی هم کاربرد پردازش تصویر کاملاً در زندگی ما مشهود است. دوربین های که به صورت اتوماتیک از ماشین هایی که تخلف رانندگی انجام می دهند عکس برداری می کند.
از سیستم های امنیتی دیگر می توان سیستم تشخیص اثر انگشت اتوماتیک را نام برد. در لپ تاپ های جدید قابلیت finger print به آنها اضافه شده و می تواند صاحب لپ تاپ را توسط اثر انگشت شناسایی کند.
کد امنیتی دیگری که همیشه همراه انسان حمل می شود، چشم انسان است. دانشمندان ثابت کرده اند که پترن های (Pattern) موجود در مردمک چشم هر انسان منحصر به فرد است و هیچ دو فردی در دنیا وجود ندارند که پترن هایی که در مردمک چشم آنها وجود دارد دقیقاً مثل هم باشد. از همین روش برای شناخت افراد و سیستم های امنیتی استفاده می شود.
در کل این خواص بیومتریک در انسان بسیار زیاد است. عرض و طول صورت، فاصله بین انگشتان دست، طول و عرض انگشت ها، فاصله ی بندها از یکدیگر و حتی خط های کشیده شده کف دست و هزاران خاصیت دیگر، تماماً خصوصیاتی هستند که برای انسان ها منحصر به فرد هستند.دوربین هایی وجود دارند که به صورت دید در شب، قادر هستند چیزهایی را که ما نمی بینیم، ببینند و پردازش کنند.اسلحه های خودکاری ساخته شده اند که به صورت اتوماتیک و دقیق نشانه گیری می کنند.
پردازش تصویر همینطور با پردازش تصاویر گرفته شده از فاصله های دور هم می تواند در علوم نظامی و امنیتی کمک کند.به عنوان مثال دوربینی قادر است با سرعت بسیار زیاد یک توپ را دنبال کند.این مسئله کاربرد بسیار زیادی در مسائل نظامی دارد.
2-6-نجوم و فضا نوردی
ساخت دستگاه های اتوماتیک رصد آسمان و ثبت وقایع آسمانی به صورت خودکار از کاربردهای پردازش تصویر است که امروزه روی آن کار می شود.
از پروژه های جدید در بخش نجوم که بخشی از آن توسط سیستم پردازش تصویر انجام می شود، تهیه نقشه سه بعدی از کل عالم کائنات است !
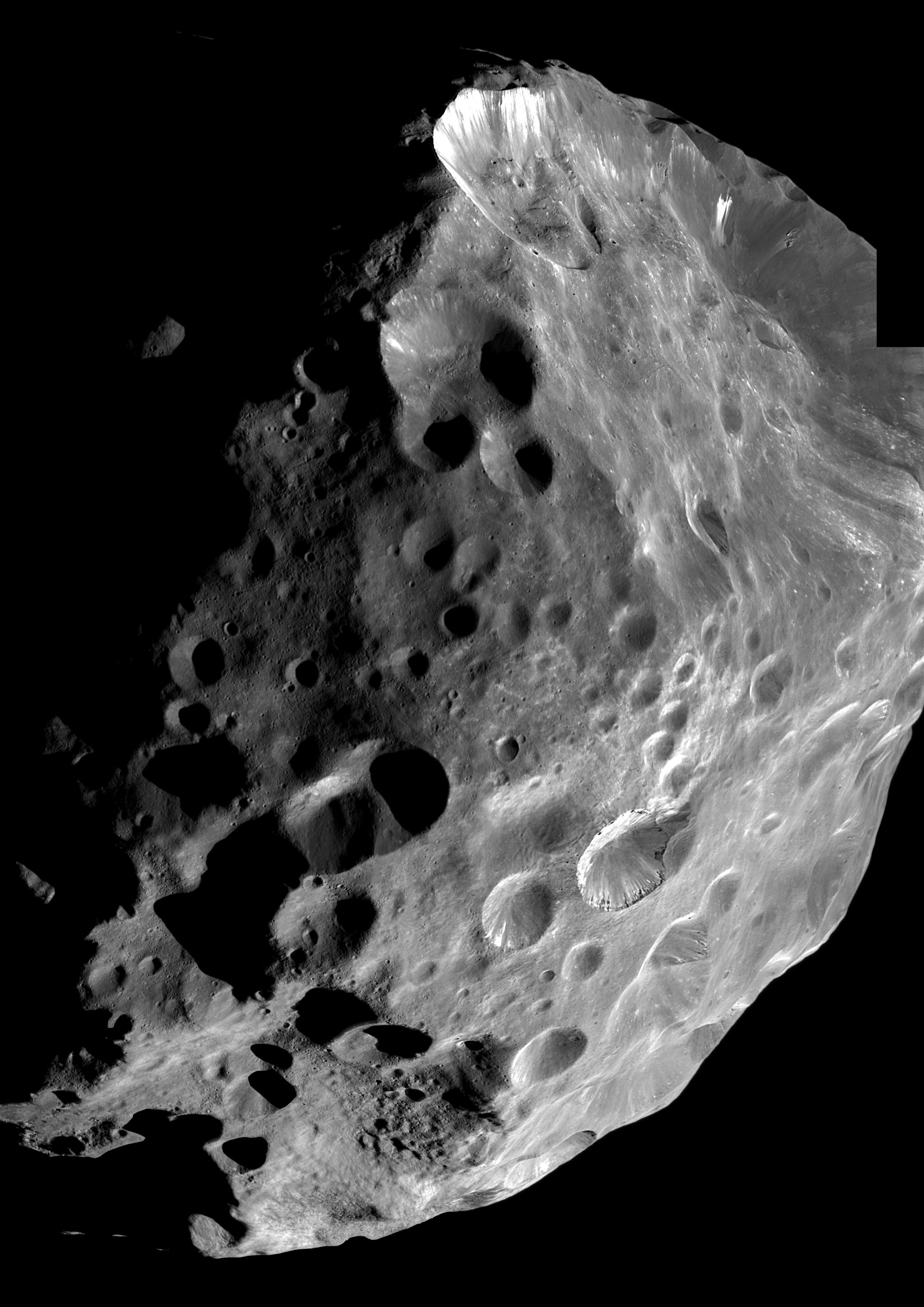
پردازش تصویر در فضانوردی هم کاربرد زیادی دارد. در تصاویر دور می توان سطح سیارات و همچنین سطح قمرها را اسکن کرده و اطلاعات بسیار ریزی از آنها استخراج کنیم.
کاربرد دیگر پردازش تصویر در فــ….یـــ……لـــ……تـــ…. …ر کردن عکس هایی است که توسط تلسکوپ های فضایی مختلف از جمله هابل (Hubble Space Telescope)، از فضا گرفته می شود.
کاربرد دیگر آن حذف گرد و خاک و جو سیاره ها از تصاویر به کمک تصویربرداری IR و X-RAY به صورت همزمان و ترکیب این تصاویر است.
در تصاویر نزدیک هم کاربرد دارد، از جمله هدایت مریخ نوردها، فرود فضاپیماهای بدون سرنشین و الصاق تجهیزات جدید به ایستگاههای فضایی به صورت خودکار.
از امکانات سایت گوگل، امکاناتی است به نام Google Mars که این برنامه دقیقاً مانند Google Earth عمل می کند با این تفاوت که Google Earth سطح زمین را در هر زمان که بخواهید و در هر نقطه ای از زمین و از ارتفاع های بسیار پائین هم نشان می دهد ولی Google Mars دقیقاً همین کار را برای سطح سیاره مریخ انجام می دهد.
2-7-پزشکی
یکی از مهمترین کاربردهای پردازش تصویر در علم پزشکی است. در جایی که ما نیاز داریم تمام عکس ها با نهایت شفافیت و وضوح گرفته شوند زیرا دیدن تمام جزئیات لازم است. جراحی های ریز microsurgery با ایجاد یک سوراخ کوچک و فقط دیدن محل جراحی توسط پزشک، از راه دور و توسط بازوهای رباتیک بسیار دقیق انجام می شوند.
2-8-فناوری های علمی
پردازش تصویر در افزایش سرعت پیشرفت های علمی تأثیر فوق العاده داشته است. اولین و مشخص ترین تأثیر آن را می توان در علم عکاسی یا هنر دید. شکار لحظه های شگفت آوری که در کسری از ثانیه اتفاق می افتد، بالا بردن وضوح عکس های گرفته شده و ایجاد افکت های خیره کننده، از دستاوردهای پردازش تصویر است.
همچنین در توسعه تکنولوژی پیشرفته (gps (Global Positioning Systems کمک زیادی داشته و تهیه نقشه های سه بعدی از جاده ها در تمام نقاط جهان، از کاربردهای دیگر آن است. با به وجود آمدن این علم، مسابقات ربات های فوتبالیست به صورت جدی دنبال شد.
این علم در پیشرفت علوم پایه فیزیک ، شیمی و مخصوصاً تحقیقات فیزیکی و مکانیکی، کمک فراوانی کرده است. به عنوان مثال وسیله ای برای حمل و نقل کالاها در مسیرهای صعب العبور ساخته شده است. قبل از ساخت آن، رفتار چهارپایان در حالت های مختلف توسط کامپیوتر تحلیل و عیناً به دستگاه آموزش داده شده است.در کل پردازش تصاویر به علت سرعت زیاد آن، در ساخت وسایل مکانیکی پر سرعت، کاربرد زیادی دارد. وسیله ای وجود دارد که قادر است ، توپی که با سرعت بسیار زیاد به سمت پائین می آید را مهار کند.
2-9-باستان شناسی
در علم باستان شناسی تنها مدارک باقی مانده از دوران باستان، دست نوشته ها، نقاشی ها و غارنگاری های قدیمی است. تهیه تصاویر از بناهای گذشته و بازسازی مجازی این بناهای تاریخی یکی از کاربردهای پردازش تصویر در این علم است. همچنین می توان نقاشی ها و غارنگاری ها را مورد پردازش دقیق قرار داد و شکل آنها را همان طور که در ابتدا بوده اند، شبیه سازی کرد. حتی می توان مکانهای باستانی را از زوایایی که تصاویر مستندی از آنها وجود ندارد، شبیه سازی کرد.
امروزه یکی از پروژه های پر سر و صدای بازسازی بناهای باستانی، بازسازی شهر روم باستان توسط دانشمندان ایتالیایی است. هم اکنون توریست ها با زدن عینک های مخصوص می توانند در خیابان های شهر روم باستان قدم بزنند.
2-10-تبلیغات
از مقایسه تبلیغات دهه ی 70 و 80 میلادی با تبلیغات امروزی می توان تأثیر تکنولوژی را در تبلیغات کاملاً درک کرد. تغییر شکل تبلیغات از اشکال مربع و زاویه دار به شکل های دایره ای، تغییر رنگ تبلیغات و هزاران تغییر دیگر. یکی از مهمترین فاکتورهای فروش و دلایل بالا رفتن یا پایین آمدن فروش، شکل و نحوه ی بسته بندی کالاست. پردازش تصویر می تواند به ما کمک کند تا قبل از تولید یک بسته بندی آن را شبیه سازی کنیم. با ادغام کردن علم الگوریتم ژنتیک با پردازش تصویر می توان برنامه ای را نوشت که به صورت اتوماتیک به ساختن بسته بندی های مختلف بپردازد و آنهایی که از نظر کاربران زیباتر و جالب تر به نظر خواهند آمد را به ما معرفی نماید.
2-11-سینما
اولین علمی که پردازش تصویر در آن مورد استفاده قرار گرفت، هنر و سینما بود. یکی از تکنولوژی های برتر دنیا motion capture است که در آن یک کاراکتر انیمیشنی قادر است حرکات دست انسان را تقلید کند. امروزه این سیستم جهت ساخت فیلم ها و بازی های کامپیوتری مورد استفاده قرار می گیرد.
در پردازش تصویر قابلیتی به نام هیستوگرام (Histogram) وجود دارد که با آن قادرند تصاویر را شفاف یا تیره تر کرده و یا هر تغییر مورد نیاز دیگری را روی تصاویر با توجه به منحنی ها و نمودارهای هیستوگرام بدهند.
در سینما برای اینکه تصویری شفاف به نظر آید، با استفاده از یک کره ی نقره ای رنگ، تصاویر اطراف دوربین را هم ثبت می کنند. بنابراین تصویر نسبت به محیط اطراف خود شفافیت غیر قابل تصوری پیدا می کند.
2-12-اقتصاد
در دنیای امروز تمام نوآوری ها، به نوعی مستقیم یا غیر مستقیم باعث تغییراتی در اقتصاد گروهی از کشورها و یا کل دنیا می شوند. پردازش تصویر هم، به صورت مستقیم و غیر مستقیم در اقتصاد تأثیر گذار است. در تبلیغات، سیاست، فضانوردی، کشاورزی، شهرسازی، سینما، پزشکی و علوم نظامی می تواند تأثیر غیر مستقیمی در اقتصاد کشورها داشته باشد. همچنین از تأثیر مستقیم آن در اقتصاد، می توان به وجود شعبه های بانک بدون کارمند اشاره کرد. این شعبه ها قادرند به صورت خودکار سریال چک ها و قبوض پرداختی را بخوانند، نوع اسکناس ها را تشخیص دهند و تا حد زیادی از کارهای یک بانک عادی را انجام دهند.
2-13-روانشناسی
بحث تاثیر رنگ در روحیه انسان اهمیت بسیار زیادی دارد به طوری که در روانشناسی گرایشی به نام روانشناسی رنگ وجود دارد. در این علم در مورد رنگ ها و تأثیر هر یک بر روح و جسم انسان صحبت می شود. به عنوان مثال رنگ قرمز بیشتر تأثیر را در چشم انسان دارد. در حالی که رنگ سبز بیشترین تأثیر را در مغز انسان دارد.
همچنین رنگ آبی باعث ایجاد حس آرامش و اطمینان در انسان می شود. به همین دلیل در سخنرانی های اکثر سیاستمداران دنیا از پرده آبی رنگ در پشت سر آن ها استفاده می شود.
با پردازش تصویر می توان به راحتی تصاویر ثابت و متحرک را ویرایش کرد. به طور مثال رنگ آبی را برای ایجاد حس اطمینان یا رنگ سبز را برای حس زیبایی و قرمز را برای ایجاد هیجان در تصاویر پر رنگ تر کرد.
2-14-زمین شناسی
با پردازش تصویر می توان کانی های مختلف را از روی رنگ و اندازه آن ها شناسایی و دسته بندی کرد. همچنین در زمین شناسی برای پی بردن به مواد تشکیل دهنده کانی ها از روش پرتونگاری ((tomography استفاده می کنند و پردازش تصویر در این بخش می تواند سرعت و دقت این روش را بسیار بالا ببرد. کاربرد دیگر آن این است که دانشمندان با مقایسه کردن ارتفاع آب در سال های مختلف، در واقع روند تند شدن یا کند شدن کاهش آّب در سطح زمین را مورد بررسی قرار می دهند.
——————-
عملیات پردازش تصویر در حقیقت مقایسه دو مجموعه عدد است که اگر تفاوت این دو مجموعه از یک محدوده خاص فراتر رود، از پذیرفتن محصول امتناع شده و در غیر اینصورت محصول پذیرفته میشود.
یکی از کاربردهای بینایی ماشین و پردازش تصویر در کنترل کیفیت خروجی کارخانهها میباشد. در این قسمت میخواهیم ببینیم که یک جسم چگونه اجازه عبور مییابد و برعکس چگونه به بعضی از جسم ها اجازه عبور و ادامه دادن داده نمیشود.
پس از اینکه جسم از جلوی سنسور عبور کرد، سیگنال ارسالی به رایانه فرمان گرفتن تصویر را می دهد. سپس تصویر گرفته شده، پردازش و نتایج لازم از آن استخراج می شود. در این جا ما سعی در مکانیزه کردن فرآیندی یکنواخت داریم که بهصورت معمول و تکراری توسط انسان انجام میشود. اولین مسأله و مشکل ما این است که چگونه عکسهای تهیه شده از اشیایی که در حال حرکت بر روی نوار نقاله هستند را تبدیل به دادههای قابل فهم و تفسیر سیستم (صفر و یک) نماییم، که این مشکل توسط دوربین CCD (Charge Coupled Device) و تبدیل داده ها به صفر و یک حل میشود. سپس این داده ها برای تحلیل به کامپیوتر انتقال می یابند.
دوربین های صنعتی و دیجیتال معمولا از نوع CCD هستند،. نور از طریق یک عدسی وارد دوربین و برروی یک پرده مخصوص تصویر میشود که تحت عنوان تراشه CCD شناخته میشود. تراشهCCD که تصاویر با استفاده از آن گرفته میشوند از تعداد زیادی سلول تشکیل شده که همگی در یک تراشه با الگوی خاصی مرتب شدهاند و تحت عنوان پیکسل (pixels) شناخته میشوند. زمانی که تراشه CCD این اطلاعات را دریافت میکند، آنها را به شکل سیگنالهای دیجیتالی از طریق کابلهایی به سیستم دریافتکننده میفرستد و بعد تصاویر در این سیستم به صورت مجموعهای از اعداد ذخیره میشوند.
——————–
صنايع چوب يكي از پر كاربرد ترين صنايع در عصر حاضر است.
اين صنعت قديمي روز به روز در حال پيشرفت در زمينه هاي مختلف آن مي باشد.
اكنون ديگر صنايع چوب به يك صنعت آميخته با هنر تبديل شده است.
همان طور كه مي دانيم برش و حالت دهي از جمله مهمترين و كليدي ترين كار هاي صنعت چوب مي باشد.
اما هميشه يك مشكل اساسي در برش صحيح چوب وجود داشت و آن هم اين بود كه چگونه چوب به حالتي برش شود كه كمترين ميزان اتلاف چوب را داشته باشد و نيز بعد از برش چگونه مي توان صحيح بودن برش را كنترل كرد.
اين مشكل نيز به راحتي توسط پردازش تصوير قابل حل است.
بعد از اين كه برش يك قسمت از چوب تمام شد ، با استفاده از يك دوربين آن قسمت را كنترل مي كنيم تا نقصي از لحاظ برش وجود نداشته باشد.
——————–
بحث شمارش، جزء لاينفك بسته بندي كالاهاي مختلف مي باشد.
زماني كه تعداد بسته بندي ها بالا رود ، اين كار يك كار خسته كننده و طاقت فرسا براي انسان به نظر مي آيد.
اما شايد ساده ترين كار در بحث پردازش تصوير ، شمارش باشد.
شمارش تعداد به خودي خود شامل چندين موضوع مي شود؛ از جمله : شمارش اجزاي داخل بسته بندي ، شمارش اجزاي روي نوار نقاله و … .
——————–
تشخیص شماره پلاک خودرو
نرم افزار شمارش خودروهای عبوری از عرض خیابان
بی شک یکی از مؤثر ترین مولفهها در مدیریت و برنامه ریزی دسترسی به آمار دقیق میباشد. درصورت وجود آمار دقیق و سریع میتوان از روشهای کنترل بهینه استفاده کرد و بهره وری را افزایش داد. به عنوان مثال اگر آمار دقیقی از میزان مصرف یک محصول غذایی وجود داشته باشد با برنامه ریزی مناسب میتوان زمینه تولید و عرضه اصولی آن را فراهم کرد. لذا احتمال نابسامانی در بازار و متضرر شدن کشاورز و مصرف کننده کاهش مییابد. چنان که بیان شد مهمترین فاکتور در برنامه ریزی دسترسی به آمار مناسب است اما تهیه آمار فرایند پیچیده و وقت گیر است و معمولا هزینه زیادی را در بر دارد. به عنوان مثال به دلایلی از جمله کنترل ترافیک یا کنترل میزان روشنایی خیابان باید خودروهای عبوری از خیابان شمارش شوند. این کار اگر به صورت دستی یا انسانی انجام شود، هزینه زیادی نیاز دارد، امکان سهل انگاری انسانی نیز وجود دارد پس استفاده از یک دستگاه مناسب که توانایی شمارش خودروهای عبوری را داشته باشد تنها گزینه ممکن است. با توجه به نیاز فوق نرم افزاری تهیه شدهاست که با استفاده از تصاویر گرفته شده از عرض خیابان خودروهای عبوری را تشخیص میدهد و تعداد آنها را شمارش میکند. این نرم افزار امکان استفاده در روز یا شب را دارا میباشد. شمایی از این نرم افزار در زیر نشان داده شدهاست.
———————
کنترل ماشین آلات و تجهیزات صنعتی یکی از وظایف مهم در فرآیندهای تولیدی است. بکارگیری کنترل خودکار و اتوماسیون روزبه روز گسترده تر شده و رویکردهای جدید با بهره گیری از تکنولوژیهای نو امکان رقابت در تولید را فراهم میسازد. لازمه افزایش کیفیت و کمیت یک محصول، استفاده از ماشین آلات پیشرفته و اتوماتیک میباشد. ماشین آلاتی که بیشتر مراحل کاری آنها به طور خودکار صورت گرفته و اتکای آن به عوامل انسانی کمتر باشد. امروزه استفاده از تکنولوژی ماشین بینایی و تکنیکهای پردازش تصویر کاربرد گستردهای در صنعت پیدا کردهاست و کاربرد آن بویژه در کنترل کیفیت محصولات تولیدی، هدایت روبات و مکانیزمهای خود هدایت شونده روز به روز گسترده تر میشود.
عدم اطلاع کافی مهندسین از تکنولوژی ماشین بینایی و عدم آشنایی با توجیه اقتصادی بکارگیری آن موجب شدهاست که در استفاده از این تکنولوژی تردید و در بعضی مواقع واکنش منفی وجود داشته باشد. علی رغم این موضوع، ماشین بینایی روز به روز کاربرد بیشتری پیدا کرده و روند رشد آن چشمگیر بودهاست. عملیات پردازش تصویر در حقیقت مقایسه دو مجموعه عدد است که اگر تفاوت این دو مجموعه از یک محدوده خاص فراتر رود، از پذیرفتن محصول امتناع شده و در غیر اینصورت محصول پذیرفته میشود. در زیر پروژههایی که در زمینه پردازش تصاویر پیاده سازی شدهاست، توضیح داده میشود. این پروژهها با استفاده از پردازش تصویر، شمارش و اندازه گیری اشیا، تشخیص عیوب، تشخیص ترک، دسته بندی اشیا و عملیات بیشمار دیگری را انجام میدهند:
1. اندازه گیری و کالیبراسیون
2. جداسازی پینهای معیوب
3. بازرسی لیبل و خواندن بارکد
4. بازرسی عیوب چوب
5. بازرسی قرص
6. بازرسی و دسته بندی زعفران
7. درجه بندی و دسته بندی کاشی
8. بازرسی میوه
———————-
اتوماسیون صنعتی
با استفاده از تکنیکهای پردازش تصویر میتوان دگرگونی اساسی در خطوط تولید ایجاد کرد. بسیاری از پروسههای صنعتی که تا چند دهه پیش پیاده سازیشان دور از انتظار بود، هم اکنون با بهرگیری از پردازش هوشمند تصاویر به مرحله عمل رسیدهاند. از جمله منافع کاربرد پردازش تصویر به شرح زیر است.
* افزایش سرعت و کیفیت تولی
* کاهش ضایعات
* اصلاح روند تولید
* گسترش کنترل کیفیت
———————
نمونه ای از کاربردهای پردازش تصویر در زمینه رهگیری (tracking):

نتیجه گیری
رد پای پردازش تصویر در بسیاری از علوم و صنایع مشاهده می شود و بعضی از این کاربردها آنچنان به پردازش تصویر وابسته هستند که بدون آن، اساساً قابل استفاده نمی باشند. کاربرد پردازش تصویر در هر یک از زمینه هایی که بحث شد، بسیار گسترده است