ریشه شناسی ربات (اتیمولوژی)
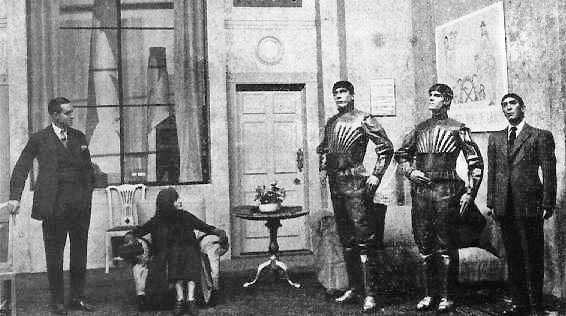
واژه ربات برای اولین بار توسط کارل چاپک نویسنده اهل جمهوری چک و در نمایشنامه کارخانه رباتسازی روسوم در سال 1920 مورداستفاده قرار گرفت. این نمایشنامه در یک کارخانه شروع می شود که در آن از یک ماده شیمیایی بهجای پروتوپلاسم(بخش زنده سلول) استفاده می شود تا بتوان انس آنهایی زنده ولی ساده را تولید کرد که به آنها ربات گفته می شود. این نمایشنامه بر روی جزئیات تکنولوژیکی ساخت این موجودات زنده تمرکز نمی کند اما ظاهر این موجودات، دربردارنده ایده های اولیه رباتهای انساننما ( اندروید) می باشد. این رباتهای کارگر که به طور انبوه تولید شدهاند، بهصورت بسیار پربازده ولی بدون احساس، ناتوان از فکر کردن بهصورت ابتکاری و بی تفاوت نسبت به حفظ جان خود به تصویر کشیده شدهاند.
یکی از مشکلات مطرحشده در این نمایشنامه این است که آیا رباتها مورد بهره کِشی قرار میگیرند یا نه و در ادامه تبعات وابستگی شدید انسان به نیروی کار مصنوعی نمایش داده می شود( بهخصوص بعد از اینکه تعدادی از رباتهای ساختهشده با روشی خاص، به خودآگاهی می رسند و رباتهای سرتاسر دنیا را به شورش علیه انسانها تحریک می کنند).
کارل چاپک خودش این واژه را اختراع نکرد. او نامه ای کوتاه به بخش ریشه شناسی فرهنگ لغت انگلیسی آکسفورد نوشت و در آن برادرش جوزف چاپک را که یک نویسنده و نقاش بود بهعنوان خالق اولیه کلمه ربات معرفی کرد.
چاپک در مقاله ای که در مجله Lidové noviny (متعلق به جمهوری چک) منتشر شد توضیح داد که در ابتدا قصد داشت این موجودات را laboři( کارگر به زبان لاتین) نامگذاری کند اما از این کلمه خوشش نمی آمد، بنابراین از برادرش مشورت گرفت. جوزف نیز به او کلمه ی roboti را پیشنهاد کرد.
Robota در زبان چک، از نظر ادبی به معنای بیگاری و کار اجباری و همچنین بهصورت تلویحی به معنای کار سخت و دشوار است و همچنین در بسیاری از زبانهای اسلاوی( مانند بلغاری،روسی، صربی، لهستانی، مقدونیه ای،اوکراینی و مجارستانی)، این واژه به معنای عمومی کار و نیروی کار است.
به طور سنتی، Robota مدت زمانی بود که یک کارگر باید بهصورت اجباری در اختیار اربابش قرار می گرفت. این مدت به طور معمول 6 ماه از سال در نظر گرفته میشد. ریشه این کلمه در زبان اسلاوی کلیسایی باستان است که در آن rabota به معنی بندگی و خدمت اجباری است که البته خود این واژه نیز از ریشه *orbh- متعلق به زبان پوروا هندواروپایی گرفته شده است. واژه ربات با ریشه آلمانی Arbeit( به معنی کار) هم ریشه تلقی می شود.
واژه رباتیک به که برای توصیف علم بررسی رباتها استفاده می شود، اولین بار توسط ایزاک آسیموف، نویسنده داستانهای علمی-تخیلی استفاده شد. آسیموف، زمینه ای به نام “سه قانون اصلی رباتیک” را ساخت که در داستانهای مختلف او مورداستفاده قرار گرفته است.
این قوانین در داستانهای تخیلی دیگر که توسط نویسنده های مختلفی نوشته شده نیز مورداستفاده قرار گرفته اند ( سه قانون مطرحشده توسط آسیموف کاملا تخیلی هستند و هیچ فناوری که تاکنون ساختهشده باشد توانایی درک یا پیروی از آنها را ندارد. درحقیقت، بسیاری از رباتها برای کاربردهای نظامی ساخته میشوند که کاملا بر خلاف آنچه در قانون اول آسیموف گفته شده، است و در برخی موارد، قانون سوم او را نیز نقض می کند).
پروفسور Joanna Bryson از دانشگاه University of Bath در این باره می گوید: “مردم اغلب در مورد قانون های آسیموف فکر می کنند؛ اما این قوانین برای این طراحی شده بودند تا نشان دهند یک سیستم اخلاقی ساده هرگز موثر نخواهد بود؛ اگر داستانهای کوتاه آسیموف را بخوانید خواهید دید که در تمامی آنها، عدم پیروی رباتها از قوانین آسیموف منجر به اتفاقات اصلی داستان می شود. پس میتوان گفت این قوانین کاملا غیر کاربردی هستند”.
انواع رباتهای مدرن
رباتهای متحرک
رباتهای متحرک میتوانند در محیط اطرافشان حرکت کنند و به یک موقعیت مکانی مشخص محدود نیستند. بهعنوان مثالی از یک ربات متحرک میتوان به ارابه یا ربات های حمل و نقل خود راهنما (AGVs) اشاره کرد. AGV یک ربات متحرک به شمار میرود که علامت ها و یا سیم های بر روی کف زمین را دنبال می کند و یا با کمک دید خود و یا استفاده از لیرزها، از نقطه ای به نقطه دیگر جابجا می شود. AGV ها در ادامه مطلب به طور گسترده تری مورد بررسی قرار میگیرند.

نمونه ای از ربات های متحرک مشهور به ارابه یا ربات های حمل و نقل خود راهنما – AVGs
رباتهای متحرک در محیط های صنعتی، نظامی و امنیتی مورداستفاده قرار میگیرند. همچنین در بعضی موارد از این رباتها بهعنوان کالای مصرفی و به منظور سرگرمی یا انجام دادن کارهایی مشخص مانند جارو کردن خانه نیز استفاده می شود. رباتهای متحرک موضوع اصلی بسیاری از تحقیقاتی هستند که در حال حاضر در زمینه رباتیک در حال انجام است و تقریباً هر دانشگاه بزرگی، یک یا دو آزمایشگاه را به تحقیق بر روی رباتهای متحرک اختصاص داده است.
رباتهای متحرک اغلب در محیط هایی که کنترل دقیقی بر روی آنها صورت میگیرد، مثلا در خطوط مونتاژ، مورداستفاده قرار میگیرند زیرا این رباتها در واکنش نشان دادن به دخالت های غیر منتظره مشکل خواهند داشت. به همین دلیل نیز انسانها به ندرت با این گونه رباتها روبرو میشوند. با این وجود، رباتهای خانگی که برای تمیز کردن و نگهداری منزل به کار می روند در بسیاری از کشور های توسعه یافته متداول هستند. از رباتهای متحرک در کاربردهای نظامی نیز استفاده می شود.
رباتهای صنعتی
رباتهای صنعتی اغلب از یک بازوی مفصل دار( بازوی مکانیکی چند قسمتی) و بخش انتهایی آن که به یک سطح ثابت متصل می شود، تشکیل شدهاند. یکی از متداول ترین انواع بخش انتهایی، گیره ها هستند.
سازمان بین المللی استانداردسازی تعریف ربات صنعتی(بازوی مکانیکی) را در استاندارد ISO 8373 به شرح زیر تعریف کرده است:
“یک بازوی مکانیکی با کنترل خودکار، قابل برنامه ریزی و چندکاره که میتوان آن را در سه محور مختلف(یا بیشتر) برنامه ریزی کرد. این ربات میتواند بهصورت ثابت در محل و یا متحرک، در کاربردهای اتوماسیون صنعتی مورداستفاده قرار بگیرد.”
این تعریف توسط فدراسیون بین المللی رباتیک، شبکه تحقیقات رباتیک اروپا (Euron) و بسیاری از کمیته های استاندارد کشور های مختلف مورد قبول واقع شده است.
رباتهای خدماتی
بیشتر رباتهای صنعتی و بازو های مکانیکی بهصورت ثابت هستند و به منظور تولید و توزیع کالا ها مورداستفاده قرار میگیرند. اما واژه “رباتهای خدماتی” به خوبی رباتهای صنعتی تعریف نشده است. فدراسیون بین المللی رباتیک، تعریف اولیه ای را برای این گونه رباتهای مشخص کرده است:” یک ربات خدماتی، رباتی است که برای ارائه خدماتی که رفاه انسانها و تجهیزات مفید است، بهصورت نیمه یا تمام خودگردان عمل می کند. این ربات در فعالیت های تولیدی شرکت نمی کند.”

نمونه ای از یک ربات خدماتی مشهور به TWENDY-ONE
رباتهای آموزشی
میتوان از رباتها بهعنوان وسایل کمک آموزشی برای معلمان استفاده کرد. از دهه 1980، رباتهایی به شکل لاک پشت در مدارس مورداستفاده قرار می گرفتند و دانش آموزان با استفاده از زبان برنامهنویسی لوگو، آنها را برنامه ریزی میکردند.
امروزه کیت های رباتی مانند Lego Mindstorms NXT، BIOLOID، OLLO و یا رباتهای آموزشی شرکت BotBrain در بازار موجود هستند. این کیت ها به کودکان کمک می کنند تا در مورد ریاضی، فیزیک، برنامهنویسی و الکترونیک چیز های مختلفی یاد بگیرند. رباتها حتی از طریق مسابقات رباتیک، وارد زندگی دانش آموزان مقاطع ابتدایی و دبیرستان نیز شده است و هر ساله مسابقات مختلفی در سرتاسر جهان برگزار می شود.

کیت رباتیLego Mindstorms NXT از سری ربات های آموزشی
البته دستگاههایی نیز وجود دارند که به شکل ربات طراحی شدهاند که بهعنوان نمونه میتوان به کامپیوتر معلم به نام Leachim و یا 2-XL که یک اسباب بازی آموزشی به شکل ربات است اشاره کرد. هر دو این وسایل توسط Michael J. Freeman ساختهشدهاند.
رباتهای ماژولار (تکه ای)
رباتهای ماژولار، نسل جدیدی از رباتها هستند که قرار است با تکه ای کردن ساختار رباتها، موارد کاربرد آنها را بیشتر کنند. بهبود عملکرد و بازده رباتهای ماژولار نسبت به رباتهای معمولی آسان تر است. این رباتها از یک نوع ماژول (تکه) مشابه یا چند نوع ماژول مختلف و یا ماژول های شبیه به هم که اندازه آنها با هم متفاوت است، ساخته میشوند. ساختار این رباتها باعث می شود تا امکان تغییر شکل های زیادی داشته باشند. در واقع میتوان رباتهای ماژولار را با بیش از 8 درجه آزادی نیز طراحی کرد. با این وجود، برنامهنویسی و سینماتیک و دینامیک معکوس برای این دسته از رباتها نسبت به رباتهای معمولی پیچیده تر است.
رباتهای ماژولار ممکن است از ماژول های L شکل، ماژول های مکعبی، ماژول های H شکل و ماژول های U شکل تشکیل شوند. فناوری ANAT که اولین فناوری مخصوص برای ساخت رباتهای ماژولار است و توسط شرکت Robotics Design طراحی شده، امکان ساخت رباتهای ماژولار با ماژول های H و U شکل را فراهم می کند به طوری که این ماژول ها در زنجیره هایی به یکدیگر متصل هستند. از چنین سیستمی برای ساخت رباتهای ماژولار با شکل های همگن و یا غیرهمگن استفاده می شود.

نمونه ای از ربات ماژولار
رباتهای ساختهشده با فناوری ANAT را میتوان با n درجه آزادی در نظر گرفت زیرا در این سیستم هر ماژول، یک سیستم رباتیک متحرک کامل است که به راحتی در برابر حرکت ماژول های قبل و بعد از خود در زنجیره، حرکت می کند و جابجا می شود. در نتیجه هر یک ماژول، امکان داشتن یک درجه آزادی را فراهم می کند. بنابراین، هرچقدر ماژول هایی بیشتری به یکدیگر متصل باشند، مجموعه آنها درجه آزادی بیشتری خواهد داشت. ماژول های L شکل را نیز میتوان بهصورت زنجیره ای در آورد، البته با افزایش اندازه زنجیره، اندازه ماژول ها باید به ناچار کمتر شود زیرا در غیر این صورت، با اضافه شدن باری که به دو انتهای زنجیره وارد می شود، کرنش وارد بر ماژول هایی که در وسط زنجیره هستند افزایش می یابد.
رباتهای ANAT با ماژول های H شکل از این مشکل رنج نمیبرند زیرا طراحی آنها بهگونهای است که به ربات اجازه می دهد تا فشار و ضربهی وارده را به طور یکنواخت در سرتاسر ماژول ها پخش کند و در نتیجه با افزایش طول ربات، ظرفیت باربری آن کاهش نمی یابد. رباتهای ماژولار را میتوان بهصورت دستی و یا خودکار مجددا تغییر شکل داد تا به رباتی دیگر تبدیل شود. در این فرآیند حتی ممکن است کاربرد ربات نیز عوض شود. به دلیل اینکه رباتهای ماژولار با ساختار مشابه، از ماژول هایی تشکیل شدهاند که برای رباتهای مختلف استفاده میشوند، میتوان یک ربات ماژولار به شکل مار را با رباتی مشابه ترکیب کرد تا یک ربات چند بازویی به دست آورد، یا حتی میتوان آن را به رباتهای کوچک تری تقسیم کرد که هر کدامشان باز هم میتوانند به رباتهای کوچکتری تقسیم شوند. این قابلیت به یک ربات ماژولار اجازه می دهد در یک وظیفه مشخص، بهصورت کاملا تخصصی عمل کند یا توانایی انجام چند وظیفه مختلف را به طور همزمان داشته باشد.
فنّاوری رباتهای ماژولار امروزه در حمل و نقل هیبریدی، اتوماسیون صنعتی، نظافت و تعمیر کانال های تهویه هوا مورداستفاده قرار میگیرد. بسیاری از مراکز تحقیقاتی و دانشگاه ها نیز بر روی این فنّاوری تحقیق کردهاند و حتی توانسته اند نمونه های اولیه موفقی را نیز بسازند.
رباتهای مشارکتی
رباتهای مشارکتی یا همکار که به آنها کوبات نیز گفته می شود، رباتهایی هستند که میتوانند در حین انجام مسئولیتهای صنعتی ساده، بهصورت ایمن و موثر با کارگران تعامل داشته باشند. با این وجود بازوهای ربات و سایر شرایط محیطی در کارگاه ممکن است باعث ایجاد حوادثی شوند؛ در نتیجه لازم است تا قبل از از هرگونه استفاده واقعی، تحلیل خطرات احتمالی انجام شود.
رباتهای مشارکتی که امروزه در صنعت مورداستفاده قرار میگیرند عمدتاً ساخت شرکت Universal Robots در کشور دانمارک هستند.
شرکت Rethink Robotics که توسط Rodney Brooks تاسیس شده، در سپتامبر سال 2012 رباتی به نام Baxter را معرفی کرد. این ربات، یک ربات صنعتی است که بهگونهای طراحی شده تا بتواند با سایر کارگران در محیط کارگاه، به طور ایمن تعامل داشته باشد و بتوان آن را برای انجام کار های ساده برنامه ریزی کرد.
رباتهای Baxter در صورتی که انسانی در مسیر بازو های رباتیک آنها قرار داشته باشد متوقف میشوند و همچنین کلید های مخصوص خاموش کردن ربات نیز بهصورت برجسته بر روی بدنه آنها نصب شده است. این رباتها که با هدف فروش به کسب و کار های کوچک ساختهشدهاند، بهعنوان معادل رباتیک یک کامپیوتر شخصی تلقی میشوند. تا ماه مِی 2014، 190 شرکت در ایالاتمتحده رباتهای Baxter را خریداری کردهاند و این رباتها در بریتانیا نیز بهصورت تجاری مورداستفاده قرار میگیرند.
رباتها در جامعه
تقریباً نصف رباتهای جهان در قاره آسیا، 32 درصد در اروپا، 16 درصد در آمریکای شمالی، 1 درصد در استرالیا و 1 درصد نیز در آفریقا هستند. 40 درصد تمام رباتهای جهان در کشور ژاپن هستند که این کشور را به بزرگترین کشور از نظر تعداد رباتها تبدیل می کند.
استقلال رباتها و سوالات اخلاقی مطرحشده
با پیشرفته تر شدن رباتها، این سوال که چه قوانین اخلاقی میتواند رفتار آنها کنترل کند توسط متخصصان و دانشگاهیان متعددی بررسی شده است. سوال دیگری که در این زمینه مطرح است این است که آیا رباتها میتوانند داشتن هر نوع حق اجتماعی، فرهنگی، اخلاقی یا حقوقی را ادعا کنند یا خیر. یک تیم از دانشمندان اعلام کرده که ممکن است تا سال 2019، مغز رباتیک ساخته شود. عده ای دیگر پیش بینی می کنند هوش رباتیک تا سال 2050 به طرز چشمگیری گسترش خواهد یافت. پیشرفت های اخیر، رفتار رباتها را بسیار پیچیده تر از قبل کرده است. تاثیر اجتماعی رباتهای هوشمند موضوع مستندی به نام Plug & Pray محصول سال 2010 میلادی است. Vernor Vinge
(متخصص و رمان نویس آمریکایی) اعلام کرده ممکن است زمانی برسد که کامپیوتر ها و رباتها از انسان باهوش تر شوند. او این پدیده را تکینگی فناوری نامیده است. او همچنین معتقد است این پدیده میتواند برای انسانها تا حدودی یا حتی به مقدار زیادی خطرناک باشد. عواقب احتمالی و راهکار مناسب برای این پدیده در مکتبی که به نام سینگولاریتاریانیسم (Singularitarianism) شناخته می شود، مورد بحث و بررسی قرار میگیرد.
در سال 2009، متخصصان در کنفرانسی به میزبانی انجمن پیشبرد هوش مصنوعی (AAAI) شرکت کردند و در مورد اینکه آیا ممکن است رباتها بتوانند هرگونه استقلالی به دست بیاورند و در صورت استقلال آنها، این امر چقدر میتواند برای انسانها تهدید یا خطر به شمار رود، بحث و گفتگو کردند. آنها به این مطلب اشاره کردند که برخی از رباتها توانسته اند به شکل های مختلفی از نیمه استقلال برسند. برای مثال بعضی از رباتها میتوانند خودشان منبع انرژی را پیدا کنند و یا به طور کاملا مستقل، از بین دشمنان، اهدافی را انتخاب کرده و با استفاده از سلاح هایشان به آنها حمله کنند. آنها همچنین به این مطلب اشاره کردند که برخی از ویروس های کامپیوتری میتوانند در مقابل پاک سازی مقاومت کنند و به درجه “هوش سوسک ها” رسیده اند. البته دستیابی ربات خودآگاهی کامل، یعنی مشابه آنچه در بسیاری از کتاب ها و فیلم های علمی-تخیلی دیده می شود، محتمل نیست، اما خطرات و مشکلات احتمالی دیگری وجود دارد. منابع رسانه ای و گروه های علمی مختلفی به روند تغییرات مشابهی در بخش های مختلف رباتیک اشاره کردهاند که در کنار هم ممکن است منجر به افزایش کاربردهای رباتها و خودگردانی و استقلال آنها شود که طبیعتا نگرانیهایی را نیز در بر خواهد داشت. در سال 2015، نشان داده شد که رباتهای Nao alderen توانایی داشتن درجه ای از خودآگاهی را نیز دارند. محققین آزمایشگاه هوش مصنوعی و منطق موسسه پلی تکنیک Rensselaer در نیویورک، آزمایشی را انجام دادند که در آن ربات به خودآگاهی رسید؛ و وقتی این اتفاق افتاد ربات جواب قبلی خود به یک سوال مشخص را اصلاح کرد.
رباتهای نظامی
بعضی از متخصصان و اعضای جامعه دانشگاهی، استفاده از رباتها برای نبرد نظامی، بهخصوص زمانی که دارای قابلیتهای خودگردانی و استقلال نسبی باشند را زیرسوال برده اند. همچنین نگرانیهایی نیز در مورد فناوری که امکان کنترل رباتهای مسلح را توسط رباتهای دیگر فراهم می کند وجود دارد. نیروی دریایی ایالاتمتحده، با بودجه خود گزارشی را تهیه کرده که می گوید با پیچیده تر شدن و پیشرفت رباتهای نظامی، باید به پیامد های تصمیم گیری آنها بهصورت مستقل، توجه بیشتری شود. یکی از محققان اعلام کرده که رباتهای خودگردان میتوانند رفتار انسانی تری داشته باشند زیرا میتوانند به طور موثری تصمیم گیری کنند اما سایر متخصصان این مطلب را قبول ندارند.

در سال 2012، ربات چهارپای نظامی Cheetah که نسخه تکامل یافته BigDog می باشد با شکستن رکورد ربات دوپایی MIT که مربوط به سال 1989 بود بهعنوان سریع ترین ربات دنیا شناخته شد.
رباتی که نگرانی های عمومی زیادی را در این زمینه ایجاد کرده است EATR نام دارد. این ربات میتواند سوخت مورد نیاز خود را به طور پیوسته و با استفاده از مواد آلی تامین کند. موتور EATR بهگونهای طراحی شده تا با استفاده از بیومَس و پوشش گیاهی که به طور مشخص توسط سنسورهایش انتخاب می شود کار کند. ربات میتواند این مواد را در میدان جنگ و یا در محل های دیگر پیدا کند. البته مسئولین پروژه اعلام کردهاند که این ربات میتواند از چربی مرغ نیز بهعنوان سوخت استفاده کند.
Manuel De Landa، نویسنده و فیلسوف آمریکایی معتقد است موشک های هوشمند و بمب های خودگردان که به درک مصنوعی مجهز هستند نیز میتوانند بهعنوان ربات تلقی شوند زیرا میتوانند به در بعضی موارد بهصورت مستقل تصمیم بگیرند. او معتقد است این کار، روندی مهم و بسیار خطرناک است که در آن انسانها، مسئولیت اتخاذ تصمیم های مهم را به ماشینها واگذار می کنند.
ربات چیست؟ قسمت 1
ربات چیست؟ قسمت 2
ربات چیست؟ قسمت 3
ربات چیست؟ قسمت 4
ربات چیست؟ قسمت 5
ربات چیست؟ قسمت 6
ربات چیست؟ قسمت 7
ربات چیست؟ قسمت 8







را بیشینه کنید.




.




![{\displaystyle m[w]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4f989722f439db408fa230d5a4a0e92841c6f088)

![{\displaystyle m[W]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/00874bc364aa5a8b086b929be26181924d5a6e20)
(جمع اعضای مجموعهٔ تهی ۰ است)
که




![{\displaystyle m[i,w]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8508d64cc83cae95ff73fa5a6e1a2bf4bfa43ca0)
اگر
اگر
.
![{\displaystyle m[0,\,w]=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0f06328f369607d3af8d34792f350ac073b5180b)
![{\displaystyle m[i,\,0]=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e5bd803ad778d00fa231ebeb1d7cf8c43fdd42b2)

![{\displaystyle m[n,W]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f7f1046af8319a84c25c874bde6bcaf24bee4489)







را به دو مجموعهٔ
و
با اندازهٔ نسبتاً برابر تقسیم کنید.