عامل های هوشمند قسمت 4
♦ عامل های مبتنی بر هدف (goal-based agents)
داشتن اطلاعات در مورد حالت فعلی محیط، همیشه برای تصمیم گیری در مورد عملی که باید انجام گیرد، کافی نیست. به عنوان مثال، در جاده، تاکسی می تواند به چپ، راست یا مستقیم برود. تصمیم گیری درست، به مقصد تاکسی بستگی دارد. به عبارت دیگر، علاوه بر توصیف حالت فعلی، عامل به اطلاعات هدف نیاز دارد که موقعیت مطلوب را توصیف می کند. بعنوان مثال، می توان به مقصد مسافر اشاره کرد. “برنامه عامل” می تواند این اطلاعات را با اطلاعاتی دزبازه نتایج فعالیتهای ممکن ترکیب کندتا فعالیتی را برای رسیدن به هدف انتخاب نماید.
گاهی انتخاب فعالیت در عامل مبتنی بر هدف آسان است (وقتی که رضایت از هدف، بلافاصله از یک فعالیت به دست می آید). گاهی این انتخاب پیچیده خواهد بود (وقتی که عامل باید دنباله های طولانی را در نظر بگیرد تا راهی برای دستیابی به هدف پیدا کند). جست وجو و برنامه ریزی ، حوزه های فرعی AI هستند که دنباله ای از فعالیت ها را برای دستیابی عامل به هدف، پیدا می کنند.
توجه کنید که این نوع تصمیم گیری با “قوانین شرط فعالیت” که شرح آنها گذشت متفاوت است، به طوری که باید آینده را در نظر گرفت: “اگر چنین و چنان کنم، چه اتفاقی می افتد؟” ، “این مراحل مرا خوشحال می کند”. در طراحی های عامل واکنشی، این اطلاعات صریحا نمایش داده نمی شوند، زیرا قوانین داخلی، مستقیما از ادراکات به فعالیت ها نگاشت می شوند. عامل واکنشی، وقتی ترمز می کند که لامپ های ترمز را ببیند. در اصل عامل مبتنی بر هدف نتیجه می گیرد که اگر چراغ ترمز اتومبیل جلویی روشن شود، سرعت آن کاهش می یابد. با توجه به چگونگی تکامل جهان، تنها عملی که منجر به برخورد با اتومبیل دیگر نمیشود، ترمز کردن است.
گرچه عامل مبتنی ببر هدف کارایی چندانی ندارد، قابلیت انعطاف آن بیشتر است. زیرا دانشی که از تصمیمات آن پشتیبانی می کند، صریحا نمایش داده می شود و قابل اصلاح است. برای عامل واکنشی، باید بسیاری از “قوانین شرط فعالیت” را بازنویسی کنیم. رفتار عامل مبتنی بر هدف می تواند تغییر کند تا به هدف مورد نظر برسد.
♦ عامل های مبتنی بر سودمندی (utility-based agents)
در بسیاری از محیط ها، اهداف، برای تولید رفتاری با کیفیت بالا کافی نیستند. بعنوان مثال، چندین دنباله از فعالیت ها وجود دارند که تاکسی را به مقصد می رسانند، اما بعضی از آنها سریع تر، امن تر، مطمئن تر یا ارزانتر از دنباله های دیگر است. اهداف آنها، فقط ملاک ناپخته ای را بین وضعیت “رضایت” و “نارضایتی” ارائه میکنند، در حالیکه معیار کارایی عمومی باید مقایسه ای بین وضعیت های دنیای متفاوت (با دنباله حالات) را براساس چگونگی رضایت عامل، در صورت نائل شدن به هدف ارائه کند.
چون “رضایت” اساس علمی ندارد، دانشمندان کامپیوتر و اقتصاد از واژه ی “سود” یا “سودمندی” استفاده می کنند. “معیار کارایی” به هر دنباله از حالتهای محیط، امتیازی را نسبت می دهد، و به این ترتیب می تواند بین مسیرهای مطلوب تر و نامطلوب برای رسیدن به مقصد تاکسی، تمایز قائل شود. تابع سودمندی عامل، معیار کارایی را در داخل عامل تعیین می کند. اگر “تابع سودمندی داخلی” و “معیار کارایی خارجی” سازگار باشند، آنگاه عاملی که فعالیت هایی را برای ماکزیمم کردن سودمندی خود انتخاب می کند، خردمندانه عمل می کند.
این روش، تنها روش خردمند بودن نیست، اما همانند عامل های مبتنی بر هدف، عامل های مبتنی بر سودمندی از نظر قابلیت انعطاف و یادگیری، امتیازات زیادی دارند. علاوه بر این، در دو مورد اهداف چندان روشن نیستند، ولی عامل مبتنی بر سودمندی هنوز میتواند تصمیمات خردمندانه بگیرد.
اولا، وقتی اهداف با هم متضاد باشند فقط بعضی از آنها قابل دستیابی هستند، که در این مورد تابع سودمندی، توازن مناسبی را بین اهداف متضاد برقرار میکند. ثانیا، وقتی چندین هدف وجود دارند که عامل میتواندبرای دستیابی به آنها کمک کند،ولی هیچ کدام از آنها با اطمینان قابل دستیابی نباشند، تابع سودمندی میتواند احتمال موفقیت اهداف را بر حسب اهمیت آنها ، افزایش دهد.
خاصیت “پاره ای قابل مشاهده” و خاصیت اتفاقی، در سراسر دنیای واقعی وجود دارد. و در نتیجه، تصمیم گیری تحت شرایط عدم اطمینان انجام می شود. از نظر تکنیکی، عامل خردمند مبتنی بر سودمندی، فعالیتی را انتخاب میکند که سود مورد انتظار مربوط به نتایج آن فعالیت، ماکزیمم باشد. منظور از سود مورد انتظارف سودی است که عامل انتظار دارد بطور میانگین، با توجه به احتمالات و سود هر یک از نتایج، به دست آورد. عاملی که دارای یک “تابع سودمندی” صریح است، می تواند تصمیم خردمندانه اتخاذ کند. برای این تصمیم گیری ،از یک الگوریتم همه منظوره استفاده میکند که به تابع سودمندی خاصی بستگی ندارد.
ماهیت محیط های عامل های هوشمند
برای ساخت عاملهای خردمند، ابتدا باید راجع به محیط های کار فکر کنیم که “مسئله هایی” هستند که عاملهای هوشمند باید آنها را حل کنند. ابتدا چگونگی مشخص کردن محیط کار را بررسی میکنیم، سپس نشان خواهیم داد که محیط های کار، تنوع زیادی دارند. هر نوع محیط وظیفه، مستقیما، طراحی مناسب “برنامه ی عامل” را تحت تاثیر قرار میدهد.
تعیین کردن محیط کار
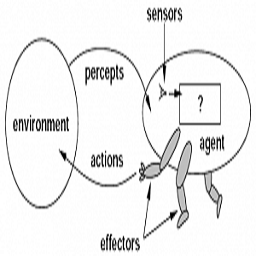
تعیین نوع عامل، معیار کارایی، محیط، حسگرها (سنسورها) و محرک ها را تحت عنوان محیط کار دسته بندی می کنیم. برای خلاصه ، این ها را به نام PEAS می خوانیم. اولین قدم در طراحی عامل، مشخص کردن محیط کار آن است. برای مثال، از مسئله ی “راننده تاکسی خودکار” (اتوماتیک) استفاده میکنیم. توجه کنید که تاکسی خودکار مورد بحث ما، خارج از قابلیت های فناوری فعلی است. وظیفه رانندگی، محدودیتی در ترکیب شرایط ندارد. هر یک از عناصر محیط کار را بیشتر مورد بحث قرار میدهیم.
معیار کارایی مربوط به راننده خودکار چییست؟ کیفیت های مطلوب عبارتنداز: رسیدن به مقصد درست، کم بودن مصرف سوخت و استهلاک، کم کردن زمان مسافرت و هزینه، کم کردن نقض قوانین ترافیک و اذیت کردن سایر رانندگان، حداکثر امنیت و راحتی مسافر، حداکثر سود. بدیهی است که بعضی از این اهداف متضاد هستند و باید متوازن شوند.
محیط تاکسی کجاست؟ هر راننده تاکسی باید با جاده ها سروکار داشته باشد، از جاده های یک طرفه تا بزرگ راه ها. جاده ها شامل ترافیک دیگری است، مثل عابرین پیاده، حیوانات، کارهای جاده ای، اتومبیل پلیس، چاله ها و دست اندازها. تاکسی باید با مسافران واقعی و بالقوه نیز سروکار داشته باشد. انتخاب های اختیاری نیز سر راه تاکسی وجود دارند. تاکسی ممکن است در سمت راست یا چپ حرکت کند، یا در جایی حرکت کند که برف عامل مهمی است. بدیهی است که هر چه محیط محدودتر باشد، مسئله طراحی آسانتر خواهد بود.
محرک هایی که برای راننده خودکار مهیا هستند، شامل آنهایی است که برای راننده انسانی فراهم است: کنترل موتور از طریق گاز، و کنترل مسیر و ترمز. علاوه براین باید با نمایش خروجی در نمایشگر یا دستگاه صوتی، با مسافران صحبت کند، با وسایل نقلیه دیگر ارتباط برقرار کند و غیره.
تاکسی برای رسیدن به هدف خود در محیط رانندگی، باید موقعیت و سرعت فعلی خود را بداند. لذا حسگرهای اصلی آن شامل یک یا چند دوربین تصویربرداری قابل کنترل، سرعت سنج و کیلومتر شمار است. برای کنترل مناسب تاکسی، به خصوص در سر پیچ ها، باید شتاب سنج داشته باشد. باید از وضعیت مکانیکی تاکسی خبر داشته باشد، لذا نیاز به حسگر های موتور، سوخت و سیستم الکتریکی است. باید ابزارهایی داشته باشد که در تاکسی معمولی وجود ندارد: سسیستم ماهواره تعیین موقعیت جهانی (GPS) که اطلاعات مربوط به موقعیت را به همراه یک نقشه در اختیار آن قرار می دهد، حسگرهای مادون قرمز یا سونار، تا فاصله آن را از سایر وسایل نقلیه مشخص کند. نیاز به صفحه کلید یا میکروفون دارد تا با مسافران ارتباط برقرار کند و مسافران مقصد خود را اعلان کنند.
عامل های نرم افزاری (یا روبات های نرم افزاری یا softbots ) در حوزه های وسیع و متعددی وجود دارند. یک روبات نرم افزاری را در نظر بگیرید که برای شبیه سازی پرواز هواپیمای بزرگ طراحی شده است. شبیه ساز شامل محیط پیچیده و با جزئیات زیاد است که حاوی هواپیما ها و عملیات زمینی است و عامل نرم افزاری باید فعالیت های متنوعی را در زمان بی درنگ انتخاب کند. برای این کار باید توانایی پردازش زبان طبیعی را داشته باشد، باید بیاموزد که هر مشتری به چه چیزی علاقمند است، و نقشه اش را بطور پویا (دینامیک) تغییر دهد. اینترنت محیطی است که پیچیدگی آن با دنیای فیزیکی برابری می کند و سکنه ی آن شامل عامل های مصنوعی متعددی هستند.
خواص محیط های کار (task environment)
بدیهی است که حدود محیط های کار AI بسیار گسترده است. می توانیم محیط های کار را به چند بعد تقسیم کنیم. این ابعاد، طراحی مناسب عامل و قابلیت اجرای هر خانواده از تکنیک ها را برای محیط عامل تعیین میکنند. این ابعاد عبارتنداز:
• “کاملا قابل مشاهده” در مقابل “پاره ای قابل مشاهده” (Fully observable vs. partially observable) :
اگر سنسور ها یا حسگرهای عامل، در هر زمان امکان دستیابی کامل به حالت محیط را فراهم کنند، می گوییم آن محیط کاملا قابل مشاهده است. محیط وظیفه، وقتی کاملا قابل مشاهده است که حسگرها تمام جنبه های مرتبط با فعالیت را تشخیص دهند. مرتبط بودن، به معیار کارایی بستگی دارد، محیط های کاملا قابل مشاهده، راحت هستند، زیرا لازم نیست عامل هیچ “حالت داخلی” را برای ردیابی دنیای خارج نگهداری کند. محیط ممکن است به دلیل وجود حسگرهای شلوغ و غیر دقیق ، از دست دادن بخشی از حالت توسط حسگر، کاملا قابل مشاهده نباشد.به عنوان مثال، تاکسی خودکار نمیتواند ببیند که رانندگان دیگر در حال فکر کردن هستند. اگر عامل فاقد سنسور باشد، آنگاه محیط آن غیر قابل مشاهده است. ممکن است تصور کنید که در اینگونه موارد، عامل نتواند به هدف خود برسد، اما اینطور نیست.
• تک عاملی در برابر چند عاملی (Single agent vs. multiagent) :
تمایز بین محیط های تک عاملی و چند عاملی، ساده به نظر می رسد. به عنوان مثال، عاملی که جدول کلمات متقاطع را به تنهایی حل می کند، بدیهی است که در محیط تک عاملی قرار دارد. در حالیکه عاملی که شطرنج بازی میکند در محیط دو عاملی قرار دارد. نکات ظریفی وجود دارد، که باید بررسی شود. اولا توضیح دادیم که چگونه یک موجودیت، به عنوان یک عامل در نظر گرفته می شود، ولی توضیح ندادیم که کدام موجودیت ها باید به عنوان عامل دیده شوند. آیا عامل A (مثل راننده تاکسی) باید با شی ء B (وسیله نقلیه دیگر) به عنوان یک عامل رفتار کند، یا میتواند با آن به عنوان شی ئی برخورد کند که براساس قوانین فیزیکی رفتار می کند، مثل موج ساحل یا حرکت برگها در اثر باد؟ نکته مهم این است که آیا بهتر است رفتار B به عنوان ماکزیمم کننده ی معیار کارایی توصیف شود که مقدار آن به رفتار عامل A بستگی دارد یا خیر. بعنوان مثال، در شطرنج، رقیب موجودیت B سعی میکندمعیار کارایی را به حداکثر برساند، و براساس قاعده شطرنج، معیار کارایی عامل A به حداقل برسد. لذا، شطرنج، یک محیط چند عاملی رقابتی است. از طرف دیگر، در محیط رانندگی تاکسی، اجتناب از تصادف ها، میزان کارایی تمام عامل ها را افزایش می دهد و در نتیجه ، این محیط یک محیط چندعاملی همیاری جزئی است. به این دلیل که، مثلا فقط یک اتومبیل می تواند فضای پارک را به خود اختصاص دهد. مشکلاتی که در طراحی عامل در محیط چند عاملی رخ میدهد، متفاوت از محیط تک عاملی است. به عنوان مثال، در محیط های چند عاملی، ارتباطات غالبا به عنوان رفتار عقلایی عامل ها ظاهر می شود. در بعضی از محیط های رقابتی، رفتار تصادفی، عقلایی است، زیرا مشکلات قابلیت پیش بینی را ندارند.
• قطعی در مقابل اتفاقی (Deterministic vs. stochastic) :
اگر حالت بعدی محیط کاملا توسط حالت فعلی و عملی که عامل در حال انجام آن است، کاملا قابل تعیین باشد، می گوییم این محیط، قطعی است، وگرنه این محیط اتفاقی است. در اصل، عامل نباید در یک محیط قطعی و کاملا قابل مشاهده، نگران عدم اطمینان باشد. (در تعریف ما، عدم اطمینان ناشی از سایر عامل ها را در محیط چند عامل، نادیده می گیریم؛ بنابراین، در یک بازی حتی اگر هیچ عاملی نتواند فعالیت های عامل های دیگر را پیش بینی کند، این بازی میتواند قطعی باشد). اگر محیط پاره ای قابل مشاهده باشد، ممکن است اتفاقی به نظر برسد. بعضی از وضعیت های واقعی، آنقدر پیچیده هستند که نگهداری تمام جنبه های مشاهده نشده ی آن، غیر ممکن است؛ برای اهداف عملی، باید با آنها بصورت غیر قطعی یا اتفاقی رفتار کرد. اگر محیطی کاملا قابل مشاهده نباشد یا غیر قطعی باشد، می گوییم این محیط غیر قابل اعتماد یا نامطمئن است. منظور از واژه ی “غیر قطعی” این است که عدم اعتماد نسبت به نتایج، بر حسب احتمالات تعیین میشود؛ محیط غیر قطعی، محیطی است که در آن، فعالیت ها بر اساس نتایج ممکن مشخص می گردد، ولی هیچ احتمالی به آنها نسبت داده نمیشود. توصیف های محیط غیر قطعی، معمولا همراه با معیارهای کارایی است که برای موفقیت عامل در تمام نتایج ممکن از فعالیت های خود، ضروری است.
• مرحله ای در مقابل ترتیبی (Episodic vs. sequential) :
در یک محیط کار مرحله ای (تقسیم پذیر) ، تجربه ی عامل به چند بخش اتمیک و یکپارچه تقسیم می شود. در هر مرحله، عامل چیزی را درک میکند و یک عمل را بر اساس آن انجام می دهد. مرحله ی بعدی، به فعالیتهای انجام شده در مراحل قبل بستگی ندارد. بسیاری از وظایف طبقه بندی، مرحله ای هستند. برای مثال، عاملی که باید قطعات معیوب را در خط مونتاژ علامت گذاری کند، براساس قطعه ی فعلی تصمیم میگیرد، و این تصمیم گیری ربطی به تصمیم گیری های قبلی ندارد. علاوه براین،تصمیمی که بر روی قطعه یفعلی گرفته میشود، تاثیری در معیوب بودن قطعه ی بعدی ندارد. از طرف دیگر در محیط های ترتیبی یا پی در پی، تصمیم فعلی میتواند برر تمام تصمیمیات بعدی موثر باشد. شطرنج و رانندگی تاکسی، محیط های ترتیبی دارند: در هر دو مورد فعالیت های کوتاه مدت میتواند نتایج دراز مدتی داشته باشد. محیط های مرحله ای خیلی ساده تر از محیط های ترتیبی هستند، زیرا لازم نیست عامل درباره آینده فکرکند.
• ایستا در مقابل پویا (Static vs. dynamic) :
اگر محیط در طول عمر عامل تغییر کند، می گوییم آن محیط برای آن عامل پویا ، وگرنه ایستا است. کار کردن در محیط های ایستا ساده است، زیرا لازم نیست عامل در هنگام تصمیم گیری، دنیا را ببیند و لازم نیست نسبت به زمان گذشته نگران باشد. محیط های پویا بطور پیوسته از عامل سوال میکنند که چه کاری می خواهد انجام دهد. اگر هنوز تصمیم نگرفته باشد، معنایش این است که تصمیم گرفته است کاری انجام ندهد. اگر محیط با گذر زمان تغییر نکند، ولی امتیازات کارایی عامل تغییر کند، می گوییم محیط نیمه پویا است. رانندگی تاکسی پویا است. اتومبیل های دیگر و خود تاکسی در حال حرکت هستند، در حالیکه الگوریتم رانندگی باید برای مرحله بعدی تصمیم بگیرد. اگر در بازی شطرنج فقط زمان مطرح باشد، نیمه پویا است.
• گسسته در مقابل پیوسته (Discrete vs. continuous) :
تمایز بین وضعیت گسسته و پیوسته می تواند به حالت محیط، اداره کردن زمان، و به ادراکات و فعالیت های عامل اعمال شود. به عنوان مثال، محیط گسسته مثل بازی شطرنج دارای چند حالت مجزای متناهی است. شطرنج دارای مجموعه گسسته ای از ادراکات و فعالیت هاست. رانندگی تاکسی یک مسئله حالت پیوسته و زمان پیوسته است: سرعت و مکان تاکسی و سایر وسایل نقلیه. از طریق بازه ای از مقادیر پیوسته عبور می کند و این کار را بطور یکنواخت در طول زمان انجام می دهد.
• شناخته شده در مقابل ناشناخته (Known vs. unknown) :
به عبارت دقیق تر، این تمایز به خود محیط مربوط نمیشود، بلکه به حالت دانش عامل در مورد “قوانین فیزیکی” محیط مربوط می شود. در محیط شناخته شده، نتایج مربوط به تمام فعالیت ها داده می شود. روشن است اگر محیط ناشناخته باشد عامل باید یاد بگیرد که این محیط چگونه کار می کند، تا بتواند تصمیمات درستی اتخاذ کند. توجه کنید که تمایز بین محیط های شناخته شده و ناشناخته، مثل تمایز بین محیط های کاملا “قابل مشاهده” و “پاره ای قابل مشاهده” نیست. ممکن است یک محیط شناخته شده ، بطور پاره ای قابل مشاهده باشد. برعکس، محیط ناشناخته میتواند کاملا قابل مشاهده باشد.
دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.