ربات چیست؟ قسمت 5
سیستمهای کنترل از راه دور
وسایلی که با کنترل از راه دور کار میکردند در اواخر قرن نوزدهم و به شکل چند اژدر کنترل از راه دور ظاهر شدند. در اوایل دهه 1870 میلادی، اژدر های کنترل از راه دور توسط جان اریکسن( بهصورت پنوماتیک)، جان لوییس لِی (هدایت بهصورت الکتریکی و با کمک سیم) و ویکتور وُن شلیها( هدایت بهصورت الکترونیکی و با کمک سیم) ساخته شدند.
اژدر بِرِنان که توسط Louis Brennan در سال 1877 اختراع شد، نیرو محرکه خود را از دو پروانه که در جهت عکس یکدیگر می چرخیدند به دست می آورد. این دو پروانه با بیرون آوردن سریع سیم های فولادی از طبلک هایی که در داخل اژدر قرار گرفته بودند، به چرخش در می آمدند. اختلاف سرعت در در آزاد کردن سیم ها، به ایستگاه ساحلی اجازه می داد تا اژدر را به سمت هدفش هدایت کند. این اژدر اولین موشک قابل هدایت کاربردی در دنیا بود. در سال 1897، مخترع بریتانیایی Ernest Wilson، گواهی ثبت اختراع، برای ساخت یک اژدر که توسط امواج هرتیزان(رادیویی) کنترل میشد را به نام خود ثبت کرد و در سال 1898، Nikola Tesla یک اژدر کنترل از راه دور بیسیم را بهصورت عمومی در معرض نمایش گذاشت زیرا قصد داشت آن را به نیروی دریایی ایالاتمتحده بفروشد.
Archibald Low، به دلیل تحقیقات نوآورانه اش بر روی موشک ها و هواپیما های هدایت پذیر در جریان جنگ جهانی اول بهعنوان “پدر سیستمهای هدایت رادیویی” شناخته می شود. در سال 1917، او یک هواپیمای کنترل از راه دور را برای یگان پروازی سلطنتی بریتانیا به نمایش گذاشت و در همان سال، اولین موشک هدایت شونده با سیم را ساخت.
ریشه واژه “ربات”
واژه “ربات” اولین بار برای یک ماشین انساننمای خودکار در نمایشنامه کارخانه رباتسازی روسوم که توسط کارل چاپک نویسنده اهل جمهوری چک در سال 1920 نوشته شده به کار رفت. اما کارل، برادرش جوزف چاپک را بهعنوان مخترع اصلی واژه ربات می شناسد. خود کلمه “ربات”، کلمه ای جدید نبود و در زبان اسلاوی، بهصورت robota(کارگر اجباری) وجود داشت. منظور از این واژه آن دسته از روستاییان و کشاورزانی بودند که تحت نظام فئودالی حاکم بر اروپای قرن نوزدهم، مجبور به کار اجباری برای فئودال ها بودند. در داستان تخیلی چاپک، انسانهای مصنوعی و بدون روح، با کمک فنّاوری های جدیدی خلق میشدند. چاپک به خوبی این ماشینها را در همان زمینه قدیمی طبقه اجتماعی robota های دوران فئودالیسم قرار داد به طوری که واژه ربات در نمایشنامه او به دسته جدیدی از کارگر های مصنوعی و ساخته دست بشر اشاره داشت.
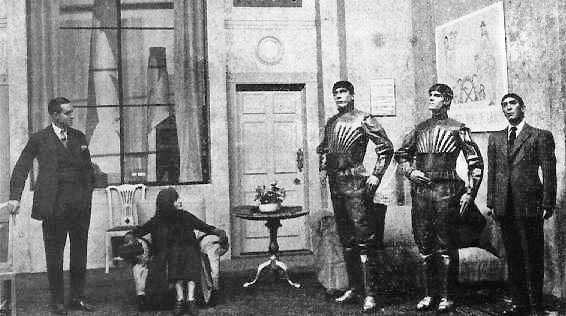
صحنه ای از نمایش نامه کارخانه ربات سازی روسوم نوشته شده توسط کارل چاپک که در آن سه ربات مشخص هستند
رباتهای اولیه
در سال 1928، یکی از اولین رباتهای انساننما به نام اریک، در نمایشگاه سالانه انجمن MES به نمایش گذاشته شد. او در این گردهمایی سخنرانی کرد. این ربات که توسط W. H. Richards ساختهشده بود دارای بدنه آلومینیومی، 11 آهنربای الکتریکی و یک موتور حرکتی بود که توان آن توسط منبع تغذیه 12 ولتی تامین میشد. این ربات میتوانست دست ها و سرش را تکان دهد و از طریق کنترل از راه دور و یا کنترل صوتی هدایت میشد. اریک و ربات بردارش یعنی جرج، برای نمایش قابلیتهایشان، به دور دنیا سفر کردند.

ربات اریک – سال 1928 میلادی
در سال 1926، شرکت Westinghouse، ربات Televox را معرفی کرد. این ربات از جنس مقوا ساختهشده بود و به چند دستگاه برقی دیگر متصل بود و کاربر میتوانست با استفاده از این ربات، آنها را خاموش یا روشن کند.
در سال 1939، ربات انساننمای Elektro، در نمایشگاه جهانی نیویورک رونمایی شد. این ربات قدی معادل 2 متر و 10 سانتیمتر و وزنی معادل 120 کیلوگرم داشت و میتوانست از طریق فرم آنهای صوتی حرکت کند، حدود 700 کلمه صحبت کند(با استفاده از یک گرامافون با سرعت 78 دوران در دقیقه)، سیگار بکشد، بادکنک ها را بترکاند و سر و دستانش را تکان دهد. بدنه این ربات از چرخنده های فولادی و چارچوبی برای نصب موتور دستگاه ساختهشده بود و روی آن پوشش آلومینیومی کشیده شده بود. در سال 1928، اولین ربات ساخت کشور ژاپن به نام Gakutensoku توسط ماکوتو نیشیمورا (زیست شناس) طراحی و ساخته شد.
رباتهای جدید خودگردان یا خودمختار (autonomous robots)
اولین رباتهای الکترونیکی خودگردان با رفتار پیچیده توسط William Grey Walter در موسسه عصبی Burden در شهر بریستول انگلستان و در سال های 1948 و 1949 ساخته شدند. او می خواست ثابت کند ارتباطات زیاد بین تعداد محدودی از سلول های مغز میتواند باعث نمود رفتار های بسیار پیچیده ای شود. در واقع او معتقد بود راز نحوه کار کردن مغز در در نحوه اتصال اجزای آن نهفته است. اولین رباتهای ساخت او، به نام Elmer و Elsie بین سال های 1948 و 1949 ساخته شدند و اغلب به دلیل شکل و سرعت پایین حرکتشان به آنها لاک پشت گفته میشد. این رباتهای لاک پشتی سه چرخه، از قابلیت فتوتاکسیس( ردیابی مسیر نور تابانده شده) بهره می بردند و با کمک این قابلیت میتوانستند در صورت کم شدن باتری، مسیر خود را به ایستگاه شارژ مجدد پیدا کنند.
Walter بر استفاده از الکترونیک آنالوگ برای شبیهسازی فرآیند های مغزی تاکید داشت در حالی که افراد هم عصر او مانند Alan Turing و John von Neumann به فرآیند های ذهنی بهصورت دیجیتال نگاه میکردند. کار های او الهام بخش بسیاری از محققین رباتیک نسل های آینده مانند Rodney Brooks ، Hans Moravec و Mark Tilden بود. تجسم های جدیدی از رباتهای Walter را میتوان در شاخهای از رباتیک به نام رباتیک BEAM( زیستشناسی، الکترونیک، زیبایی شناسی و مکانیک) مشاهده کرد.
اولین رباتی که بهصورت دیجیتالی عمل می کرد و قابل برنامه ریزی بود توسط George Devol در سال 1954 ساخته شد و در نهایت Unimate نام گرفت. این ربات، زمینه را برای صنعت رباتیک مدرن فراهم کرد. Devol اولین Unimate را در سال 1960 به شرکت جنرال موتورز فروخت. این ربات در سال 1961 در یکی از کارخانه های این شرکت در نیوجرزی آمریکا نصب شد تا قطعات داغ فلز را از یک دستگاه ریختهگری بلندکرده و آنها را در جایی انبار کند. گواهی ثبت اختراع Devol برای اولین بازوی رباتیک قابل برنامه ریزی و تمام دیجیتال، بهعنوان پایه و اساس صنعت رباتیک مدرن شناخته می شود.
اولین ربات palletizer(ربات برداشت مواد و قرار دادن آنها در جایی دیگر) در سال 1963 و توسط شرکت Fuji Yusoki Kogyo ساخته شد. در سال 1973، رباتی با شش محور الکترومکانیکی توسط شرکت رباتیک KUKA در آلمان ثبت شد. باز رباتیک مفصلی(PUMA) توسط Victor Scheinman در سال 1976 ساخته شد و طرح آن به شرکت Unimation فروخته شد.
کاربرد رباتهای صنعتی و تجاری امروزه به شدت افزایش پیدا کرده و این رباتها، وظایفشان را ارزان تر و یا با دقت و اطمینان پذیری بیشتری نسبت به انسانها انجام میدهند. از رباتها همچنین برای انجام کارهایی استفاده می شود که انجام دادن آنها برای انسانها، بسیار سخت یا خطرناک یا کسل کننده است. رباتها، کاربردهای فراوانی در تولید، مونتاژ، بسته بندی، حمل و نقل، اکتشافات زمینی و فضایی، جراحی های پزشکی، سلاح های نظامی، تحقیقات آزمایشگاهی و تولید انبوه کالاهای مصرفی و صنعتی دارند.
آینده رباتیک
روشهای مختلفی برای توسعه علم رباتیک و رباتها به وجود آمده است. یکی از این روش ها رباتیک تکاملی نام دارد که در آن تعدادی از رباتهای مختلف تحت آزمایش های متفاوتی قرار میگیرند. آن دسته از رباتهایی که عملکرد بهتری را در آزمایش های فوق داشته باشند بهعنوان مدلی برای ساخت نسل بعدی رباتها مورداستفاده قرار میگیرند. یکی دیگر از این روش ها، رباتیک توسعه ای نام دارد که تغییرات و پیشرفت های یک ربات را در زمینه های حل مسئله و کاربردهای دیگر مورد بررسی قرار می دهد. اخیرا نوع جدیدی از رباتها معرفی شده که هم بهعنوان یک گوشی هوشمند و هم بهعنوان ربات عمل می کند و نام آن RoboHon است.
با پیشرفته تر شدن رباتها، ممکن است در آینده به سیستم عامل استانداردی برای آنها نیاز باشد. “سیستم عامل ربات”(ROS) مجموعه ای از برنامه های کد منبع باز است که در حال حاضر در دانشگاه استنفورد، دانشگاه MIT و دانشگاه فنی مونیخ و البته چند دانشگاه دیگر در حال توسعه است. ROS امکان برنامهنویسی سیستم جهت یابی و اعضای بدن ربات را، صرف نظر از نوع سخت افزار به کار رفته در آن، فراهم می کند. همچنین این سیستم عامل دستورات سطح بالایی را نیز برای مواردی چون تشخیص تصویر و یا باز کردن در ها ارائه می کند. وقتی سیستم عامل ROS بر روی کامپیوتر داخلی ربات بوت می شود، دادههایی مانند طول و میزان حرکت اعضای مختلف ربات را به دست می آورد. این دادهها از طریق سیستم عامل به الگوریتم های سطح بالاتری منتقل میشوند. علاوه بر این، مایکروسافت نیز با کمک نرم افزار Robotics Developer Studio که از سال 2007 در دسترس است، در حال توسعه یک سیستم عامل به نام”ویندوز برای رباتها” می باشد.
ژاپن امیدوار است تا سال 2025 بتواند تمامی رباتهای خدماتی را بهصورت تمام مقیاس، تجاری سازی کند. بسیاری از تحقیقات در زمینه فناوری در ژاپن توسط موسسات وابسته به دولت، بهخصوص وزارت بازرگانی این کشور انجام می شود.
بسیاری از کاربردهای رباتها در آینده برای مردم مشخص است. اما این در حالی است که این کاربرد ها در حال حاضر بسیار دور از دسترس توانایی فعلی رباتها هستند. حتی از سال 1982، این اطمینان وجود داشت که روزی رباتها میتوانند:
- قطعات را با جدا کردن ضایعات قالب گیری تمیز کنند.
- اتومبیل ها را با اسپری و بدون دخالت انسان رنگ کنند.
- چیز های مختلفی را بسته بندی کنند( مثلا بسته های شکلات را بهصورت کاملا مرتب در جعبه قرار دهند).
- کابل های هارنس بسازند.
- کامیون ها را با جعبه های محصولات پر کنند.
- کالا های نرم مانند پوشاک و کفش را منتقل کنند .
- پشم چینی گوسفندان را انجام دهند .
- پروتز (اندام های مصنوعی) را تهیه و نصب کنند.
- غذا های فست فودی را آماده کنند و یا در سایر صنایع خدماتی کار کنند.
- در خانه مشغول به کار شوند (رباتهای خانگی).
- بهطورکلی میتوان گفت این پیش بینی ها در بازه زمانی فعلی بیش از حد خوشبینانه است.
کاربردهای جدید و نمونه های اولیه آنها
در سال 2008، شرکت Caterpillar، ایده ساخت دامپ تراکی را که میتوانست بدون نیاز به راننده، مواد معدنی را از معدن به بیرون منتقل کند، مطرح کرد. بسیاری از تحلیل گران معتقدند کامیون های بدون راننده، در نهایت لجستیک را متحول خواهد کرد و انقلابی عظیم را در صنعت به وجود خواهد آورد.تا پایان سال 2014، Caterpillar توانست این دامپ تراک تمام اتوماتیک را بسازد که انتظار میرود فرآیند معدن کاری را به طور چشمگیری متحول کند. در سال 2015، این کامیون های ساخت Caterpillar توسط شرکت معدنیRio Tinto Coal Australia ، به طور کامل در عملیات معدن کاری در استرالیا مورداستفاده قرار گرفتند. برخی تحلیل گران معتقدند در چند دهه آینده، بسیاری از کامیون ها کاملا خودکار خواهند بود.
یک ربات باسواد ( رباتی که توانایی خواندن دارد) به نام Marge، از طریق هوش مصنوعی خود میتواند روزنامه بخواند، کلماتی را که از نظر املایی مشکل دارند پیدا کرده و تصحیح کند، در مورد بانک های مختلف مثلا بانک Barclays یاد بگیرد و متوجه شود که برای غذا خوردن، برخی رستورانها مناسب تر از بقیه هستند.
Baxter یک ربات جدید است که در سال 2012 معرفی شد. این ربات میتواند با هدایت دیگران، چیز های جدیدی یاد بگیرد. برای مثال یک کارگر میتواند به Baxter یاد دهد که یک کار را چگونه انجام دهد. برای این کار او دست هایش را به شکل مورد نظر حرکت می دهد و Baxter حرکات دست او را به خاطر می سپارد. برای تنظیم میزان دقت و ویژگی های مختلف دیگر، دکمه ها و کنترل های بیشتری بر روی دستBaxter وجود دارد. هر کارگر ساده ای میتواند Baxter را برنامه ریزی کند و این کار تنها چند دقیقه زمان می برد. کاری که برای سایر رباتهای صنعتی، به میزان زیادی برنامهنویسی و کد نوشتن نیاز دارد تا بتوان از آن استفاده کرد. در واقع میتوان گفت Baxter برای عمل کردن به برنامهنویسی احتیاج ندارد. به هیچ مهندس نرم افزاری نیاز ندارد. همچنین میتوان به Baxter آموزش داد تا بتواند کار های پیچیده تر و یا چند کار را بهصورت همزمان انجام دهد. در سال 2015، ربات دیگری به نام Sawyer برای انجام کارهای کوچک تر و دقیق تر ساخته شد.

Baxter یک ربات جدید است که در سال 2012 معرفی شد.
ربات چیست؟ قسمت 1
ربات چیست؟ قسمت 2
ربات چیست؟ قسمت 3
ربات چیست؟ قسمت 4
ربات چیست؟ قسمت 5
ربات چیست؟ قسمت 6
ربات چیست؟ قسمت 7
ربات چیست؟ قسمت 8

دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.