عامل های هوشمند قسمت 3
عامل های هدف گرا
با مطالعه عامل هایی که خود را با محیط اطراف وقف میدهند، متوجه شدیم که آگاهی از تغییرات محیط یک امر حیاتی میباشد. اما آیا تنها آگاهی از تغییرات محیط برای آنکه بدانیم چه واکنشی را باید انجام داد کافی است؟ برای مثال فرض کنید که راننده هوشمند در جاده بر سر یک سه راهی رسیده است. مسئله ای که واضح است این است که راننده برای رسیدن به مقصد باید یکی از سه مسیر مستقیم، راست و یا چپ را انتخاب نماید. به زبان دیگر، علاوه بر آگاهی از تغییرات و وضعیت جاری محیط اطراف، باید اطلاعاتی در مورد هدف نهایی در اختیار عامل قرار گیرد.
عامل میتواند اطلاعات وضعیت جاری را با واکنش های انتخابی ممکن ترکیب کرده و از این دو به یک راه حل برای رسیدن به هدف خود برسد. گاهی اوقات این مسئله ساده میباشد و با انتخاب یک واکنش سریعا به هدف خواهیم رسید. گاهی نیز رسیدن به هدف پیچیده بوده و نمیتوان تنها با انتخاب یک واکنش به هدف رسید. در چنین مسائلی با توالی از واکنش ها که به هدف ختم میشوند روبرو خواهیم بود.
برای مثال فرض کنید که راننده هوشمند قصد دارد تا مسیری را از میان خیابان های تو در تو یک شهر بزرگ برای رسیدن به مقصد انتخاب نماید. (Google Map یک مثال کاربردی آن میباشد) آیا این کار به سادگی انتخاب یک واکنش خواهد بود؟! نکته ی مهمی که باید به آن توجه داشت این است که در عامل های هدف گرا مکانیزم تصمیم گیری شباهتی به مکانیزم استراتژی واکنشی ساده ندارد. در این عامل ها باید همواره به این دو سوال جواب داد.
اگر من این واکنش را انجام دهم چه اتفاقی (اتفاقات ناشی از یک واکنش) خواهد افتاد؟
آیا انجام این واکنش (ها) مرا به هدف میرساند؟
در عامل های واکنشی ساده هیچ گاه چنین سوالاتی به صورت ضمنی مطرح نمیشوند زیرا به علت وضوح مسئله و شرایط پیش آماده، واکنش کاملا واضح و قطعی خواهد بود. همانطور که پیشتر نیز گفتیم به آنها وضعیت شرایط-واکنش میگویند. در واقع در این عامل ها برای شرایط خاص، واکنش های خاصی توسط طراح برنامه نویسی شده است. (مثال ترمز). بر اساس کتاب راسل عامل های هدف گرا در عین انعطاف پذیری بالا در شرایط گوناگون، از بازدهی پایینی برخوردارند. این موضوع را میتوانید شخصا در مطالبی که در مورد روش های جستجو بحث خواهیم کرد بررسی و قضاوت نمایید.
عامل های مبتنی بر سودمندی
گاهی اوقات تنها رسیدن به هدف نیست که در افزایش بازدهی عامل هوشمند موثر است. برای مثال فرض کنید میخواهیم از تهران به چالوس سفر کنیم. برای این سفر انتخاب های متعددی میتواند توسط راننده هوشمند انجام شود. اگر قرار باشد راننده هوشمند در محاسبات خود تنها به رسین به هدف توجه کند ممکن است در طول سفر خود از زاهدان عبور نماییم! دلیل این اتفاق کاملا واضح است. در این مسئله برای عامل هیچ اهمیتی ندارد که کدام مسیر را انتخاب نماید!
تنها موردی که برای عامل اهمپیت دارد رسیدن به هدف است! بدین ترتیب در این مثال سفر 5 ساعته ما به 50 ساعت افزایش پیدا خواهد کرد و عملا هوشمندی عامل مورد نظر شکست خورده و فاقد ارزش میباشد. (در مطالبی که مرتبط با الگورتیم های جستجوی هدف میباشند این مشکل را به وضوح مشاهده خواهید کرد.) پس میتوان نتیجه گیری نمود که در مسئله فوق عواملی جز هدف وجود دارند که در استراتژی انتخاب واکنش ها تتاثیر چشم گیری میگذارند.
اگر بخواهیم خیلی ساده عامل های مبتنی بر سودمندی را تعریف نماییم میتوانیم بگوییم اگر دو عامل داشته باشیم که برای حل یک مسئله یکسان دو مجموعه واکنش را به عنوان خروجی بازگردانند (دو راه حل متفاوت) بطوری یکی از این دو مجموعه بر دیگری برتری داشته و ترجیح داده شود (هزینه ی کمتری داشته باشد) میگوییم سودمندی یک عامل از دیگری بیشتر است. در کتاب راسل مفهوم سودمندی را فانکشنی دانسته که میتواند وضعیت عامل را به یک عدد حقیقی نسبت داده که این عدد نشان دهنده میزان کسب موفقیت توسط عامل میباشد. استفاده از چنین عاملی در دوحالت باعث گرفتن تصمیم عاقلانه در زمان رخ دادن مشکل بین اهداف میشود.
زمانی که اهداف متضاد داریم که هم زمان نمیتوان به تمام آنها دست یافت. برای مثال بحث سرعت رسیدن به مقصد و امنیت جانی مسافران
زمانی که عامل برای رسیدن به اهدافی تلاش میکند که هیچ کدام از قطعیت کامل برخوردار نیستند. که در اینجا عامل بحث اهمیت اهداف را دخالت خواهد داد.
منبع : http://retro-code.ir
ساختار عامل های هوشمند
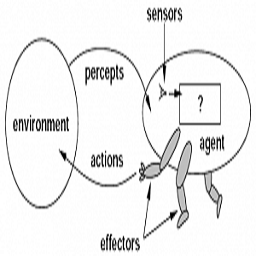
کار AI طراحی برنامه ی عامل است که “تابع عامل” را پیاده سازی می کند. تابع عامل، ادراکات را به فعالیت ها نگاشت می کند. فرض میکنیم این برنامه بر روی یک دستگاه محاسباتی با حسگرها و محرک های فیزیکی، یعنی معماری اجرا می شود: برنامه + معماری = عامل
بدیهی است برنامه ای که انتخاب می کنیم باید با معماری تناسب داشته باشد. اگر برنامه بخواهد فعالیتی مثل راه رفتن را انجام دهد، معماری باید دارای پا باشد. معماری ممکن است یک pc معمولی، اتومبیل روباتیک با چند کامپیوتر، دوربین و سایر حسگر ها باشد. بطور کلی معماری، از طریق حسگرهای موجود درک می کند، برنامه را اجرا می کند، و انتخاب های فعالیت برنامه را به محرک ها ارسال می کند.
♦ برنامه های عامل (agent programs)
برنامه های عامل درک فعلی را به عنوان ورودی از حسگرها (سنسورها) می پذیرند، و فعالیت را از طریق محرک ها انجام می دهند. توجه داشته باشید که ، برنامه عامل درک فعلی را به عنوان ورودی می گیرد، ولی تابع عامل کل سابقه درک را دریافت میکند. برنامه ی عامل، فقط درک فعلی را به عنوان ورودی می پذیرد، زیرا هیچ چیز دیگری از محیط در دسترس نیست. اگر فعالیت های عامل ، به کل “دنباله ی ادراک” بستگی داشته باشد، عامل باید کل ادراک ها را به یاد بیاورد.
برنامه عامل، از طریق شبه کد ساده ای توصیف میشود. بعنوان مثال، شکل زیر یک برنامه عامل ساده را نشان میدهد که “دنباله ادراک” را ردیابی کرده از آن به عنوان شاخصی در جدول فعالیت ها استفاده می کند تا تصمیم بگیرد چه کاری باید انجام دهد. این جدول، تابع عاملی را صریحا نشان میدهد که در برنامه ی عامل گنجانده شده است. برای ساخت عامل خردمند، باید جدولی بسازیم که برای هر دنباله ی ادراک ممکن ، دارای فعالیت های مناسبی باشد.
function TABLE-DRIVEN-AGENT (percept) returns an action
presistent: percepts, a sequence, initially empty table, a table of actions, indexed by percept sequences, initially fully specified
append percept to end of percepts
action < - - LOOKUP(percepts,table)
return action
برای هر درک جدید فراخوانی می شود و هر بار فعالیتی را بر می گرداند. با استفاده از برنامه TABLE-DRIVEN-AGENT ساختمان داده های خود، دنباله ادراک را ردیابی می کند.
برنامه TABLE-DRIVEN-AGENT تابع عامل مطلوب را پیاده سازی میکند. چالش مهم AI، چگونگی نوشتن برنامه ای است که با استفاده از یک کد کوچک (به جای جدول بزرگ)، رفتار عقلایی را انجام دهد. مثال های زیادی داریم که نشان می دهد، این کار امکان پذیر است. به عنوان مثال، جدول های بزرگ ریشه دوم که قبل از دهه 1970 توسط مهندسین و دانش آموزان مورد استفاده قرار گرفت، جای خود را به یک برنامه 5 خطی داده است که از روش نیوتن استفاده میکند و در ماشین حساب های الکترونیکی قابل استفاده است. AI همان کاری را انجام می دهد که نیوتن برای ریشه دوم انجام میدهد.
در ادامه، چهار نوع برنامه عامل را بررسی می کنیم که قواعد مربوط به تمام سیستم های هوشمند را دربر می گیرد. هر نوع برنامه ی عامل, اجزای خاصی را به روش های خاصی با هم ترکیب میکند تا فعالیت را انجام دهد.
♦ عامل های واکنشی ساده (simple reflex agents)
ساده ترین نوع عامل ها، عامل واکنشی ساده است. این عامل ها فعالیت ها را بر اساس درک فعلی و بدون در نظر گرفتن سابقه ی ادراک، انتخاب میکنند. فرض کنید راننده ی تاکسی خودکار هستید. اگر اتومبیل جلویی ترمز کند و چراغ ترمز آن روشن شود، باید آن را تشخیص دهید و ترمز کنید. به عبارت دیگر ، برخی پردازش ها بر روی دریافت اطلاعات تصویر ورودی صورت می گیرد تا شرایطی که ما آن را “ترمزکردن اتومبیل جلویی” می نامیم رخ دهد، سپس این رویداد موجب فعال شدن برخی اتصالات موجود در برنامه عامل خواهد شد و عمل “اقدام به ترمز” را فعال می سازد. این اتصال را قانون شرط فعالیت یا قانون شرط کنش می نامیم: اگر اتومبیل جلویی ترمز کرد آنگاه اقدام به ترمز کن.
انسان نیز چنین اتصالاتی دارد، که بعضی از آنها پاسخ های آموخته شده هستند (مثل رانندگی) و بعضی دیگر غریزی هستند (مثل بستن چشم هنگام نزدیک شدن شی ء ای به آن). روش کلی و قابل انعطاف این است که یک مفسر همه منظوره برای قوانین شرط فعالیت ساخته شود و سپس مجموعه ای از قوانین برای محیط های کار خاص ایجاد گردد. در شکل زیر، برنامه ی عامل نشان داده شده است که خیلی ساده است. تابع INTERPRET-INPUT با استفاده از ادراک، یک توصیف انتزاعی از حالت فعلی ایجاد میکند، و تابع RULE-MATCH اولین قانون موجود در مجموعه ای از قوانین را بر می گرداند که با توصیف حالت خاص مطابقت دارد:
function SIMPLE-REFLEX-AGENT (percept) returns an action
presistent: ruless, a set of condition-action rules
state < - - INTEERPRET-INPUT (percept)
rule < - - RULE-MATCH (state,rules)
action < - - rule.ACTION
return action
عامل واکنشی ساده براساس قانونی عمل می کند که شرط آن با حالت فعلی که توسط ادراک تعریف شده است، تطبیق می کند.
“عامل های واکنشی ساده”، خواص ساده ولی هوش اندکی دارند. عامل تعریف شده در شکل بالا در صورتی کار میکند که تصمیم درستی براساس ادراک فعلی اتخاذ گردد. یعنی در صورتیکه محیط کاملا قابل مشاهده باشد. حتی عدم قابلیت مشاهده ی کوچک نیز ممکن است مشکلاتی را ایجاد کند.
اجتناب از حلقه های بی نهایت، در صورتی ممکن است که عامل بتواند فعالیت خود را تصادفی کند. در بعضی موارد، “عامل واکنشی ساده ی تصادفی” ممکن است مثل “عامل واکنشی ساده ی قطعی” عمل کند. رفتار تصادفی درست، در بعضی از محیط های چند عاملی میتواند عقلایی باشد. در محیط های تک عاملی، فعالیت تصادفی معمولا عقلایی نیست. این روش، در بعضی از وضعیت ها به عامل واکنشی ساده کمک می کند. اما در اغلب موارد، با استفاده از عامل های قطعی تخصصی، بهتر می توان عمل کرد.
♦ عامل های واکنشی مبتنی بر مدل (model-based reflex agents)
موثرترین راه برای اداره کردن محیط “پاره ای قابل مشاهده” این است که عامل، بخشی از دنیایی را که فعلا نمیتواند ببیند، نگهداری کند. یعنی عامل باید حالت داخلی را ذخیره کند که به سابقه ی ادراک بستگی دارد و در نتیجه، بعضی از جنبه های مشاهده نشده ی حالت فعلی را منعکس می سازد. برای مسئله ترمز کردن، حالت داخلی چندان گران نیست، زیرا فریم قبلی دوربین، به عامل اجازه می دهد که تشخیص دهد چه زمانی دو لامپ قرمز موجود در لبه های اتومبیل همزمان خاموش یا روشن می شوند. برای کارهای دیگر رانندگی، مثل تغییر مسیر، عامل باید بداند که اتومبیل های دیگر در کجا قرار دارند (اگر نمیتواند همزمان آنها را ببیند).
تغییر این اطلاعات داخلی با مرور زمان، مستلزم دو نوع دانش است که باید در برنامه عامل کدنویسی شود. اولا باید بدانیم که دنیا چگونه مستقل از عامل تکامل می یابد. ثانیا، باید بدانیم که فعالیت های عامل، چه تاثیری در دنیا دارد. این دانش درباره ی “چگونگی عملکرد جهان” چه به صورت مدارهای منطقی ساده پیاده سازی شود یا به صورت تئوری های علمی، مدلی از دنیا نام دارد. عاملی که از چنین مدلی استفاده میکند، عامل مبتنی بر مدل نام دارد. برنامه عامل در شکل زیر نشان داده شده است. بخش جالب، تابع UPDATE-STATE است که مسئول ایجاد توصیف جدیدی از حالت داخلی است. جزئیات چگونگی نمایش مدل ها و حالت ها، به نوع محیط و فناوری استفاده شده در طراحی عامل بستگی دارد.
function MODEL-BASED-REFLEX-AGENT (percept) returns an action
presistent: state, the agent's current conception of the world state
model, a description of how the next state depends on current state and action
rules, a set of condition-action rules
action, the most recent action, initially none
state < -- UPDATE-STATE (state, action, peercept, model)
rule < -- RULE-MATCH (state,rules)
action < -- rule.ACTION
return action
عامل واکنشی مبتنی بر مدل، حالت فعلی دنیا را با یک مدل داخلی ردیابی، و همانند عامل واکنشی ساده، فعالیتی را انتخاب میکند.
عامل های هوشمند قسمت 1
عامل های هوشمند قسمت 2
عامل های هوشمند قسمت 3
عامل های هوشمند قسمت 4
عامل های هوشمند قسمت 5
دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.